
how to generate a trajectory data from PCL
Hey all.
I wonder if you know how to generate a trajectory like this
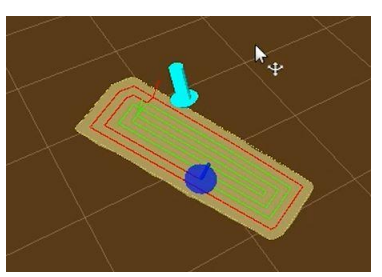
We read data from PCL to detect a flat surface and then generate a trajectory. Assuming we know the flat surface and its coordiante. I wonder if you could give me some suggestions, or a link to begin with?
Thank you.
add a comment
