
My hector-mapping will crash soon after start.
I'm trying to use depthimage_to_laserscan + hector_mapping.
But the hector-mapping process will die soon.
My RGB-D camera is ASUS xtion pro live.
I'm not pretty sure about the parameter tf_map_scanmatch_transform_frame_name.
Hope someone can help me to check which parameter I did wrong.
Here is my hector-mapping launch file:
<launch>
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth_registered/image_raw"/>
<remap from="camera_info" to="/camera/depth_registered/camera_info"/>
<param name="scan_height" type="double" value="10"/>
<param name="range_max" type="double" value="3.0"/>
<param name="range_min" type="double" value="0.5"/>
</node>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- <param name="map_resolution" type="double" value="0.25"/> -->
<param name="map_size" type="double" value="2048"/>
<param name="laser_min_dist" type="double" value="0.5"/>
<param name="laser_max_dist" type="double" value="3"/>
<param name="tf_map_scanmatch_transform_frame_name" type="string" value="camera_link"/>
<remap from="/map" to="/cake_car/grid_map"/>
</node>
</launch>
After launching hector-mapping, it will show below log and die soon:
PARAMETERS
* /depthimage_to_laserscan/range_max: 3.0
* /depthimage_to_laserscan/range_min: 0.5
* /depthimage_to_laserscan/scan_height: 5.0
* /hector_mapping/laser_max_dist: 3.0
* /hector_mapping/laser_min_dist: 0.5
* /hector_mapping/map_size: 2048.0
* /rosdistro: kinetic
* /rosversion: 1.12.7
NODES
/
depthimage_to_laserscan (depthimage_to_laserscan/depthimage_to_laserscan)
hector_mapping (hector_mapping/hector_mapping)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[depthimage_to_laserscan-1]: started with pid [19927]
process[hector_mapping-2]: started with pid [19928]
HectorSM map lvl 0: cellLength: 0.25 res x:2048 res y: 2048
HectorSM map lvl 1: cellLength: 0.5 res x:1024 res y: 1024
HectorSM map lvl 2: cellLength: 1 res x:512 res y: 512
[ INFO] [1494568672.381154979]: HectorSM p_base_frame_: base_link
[ INFO] [1494568672.381201806]: HectorSM p_map_frame_: map
[ INFO] [1494568672.381211492]: HectorSM p_odom_frame_: odom
[ INFO] [1494568672.381219273]: HectorSM p_scan_topic_: scan
[ INFO] [1494568672.381231712]: HectorSM p_use_tf_scan_transformation_: true
[ INFO] [1494568672.381251718]: HectorSM p_pub_map_odom_transform_: true
[ INFO] [1494568672.381269650]: HectorSM p_scan_subscriber_queue_size_: 5
[ INFO] [1494568672.381287157]: HectorSM p_map_pub_period_: 2.000000
[ INFO] [1494568672.381302011]: HectorSM p_update_factor_free_: 0.400000
[ INFO] [1494568672.381319155]: HectorSM p_update_factor_occupied_: 0.900000
[ INFO] [1494568672.381335107]: HectorSM p_map_update_distance_threshold_: 0.400000
[ INFO] [1494568672.381349184]: HectorSM p_map_update_angle_threshold_: 0.900000
[ INFO] [1494568672.381363535]: HectorSM p_laser_z_min_value_: -1.000000
[ INFO] [1494568672.381377877]: HectorSM p_laser_z_max_value_: 1.000000
SearchDir angle change too large
SearchDir angle change too large
SearchDir angle change too large
SearchDir angle change too large
SearchDir angle change too large
[hector_mapping-2] process has died [pid 19928, exit code -11, cmd /opt/ros/kinetic/lib/hector_mapping/hector_mapping /map:=/cake_car/grid_map __name:=hector_mapping __log:=/home/josper/.ros/log/aa3da976-361a-11e7-be0c-f48c5026facf/hector_mapping-2.log].
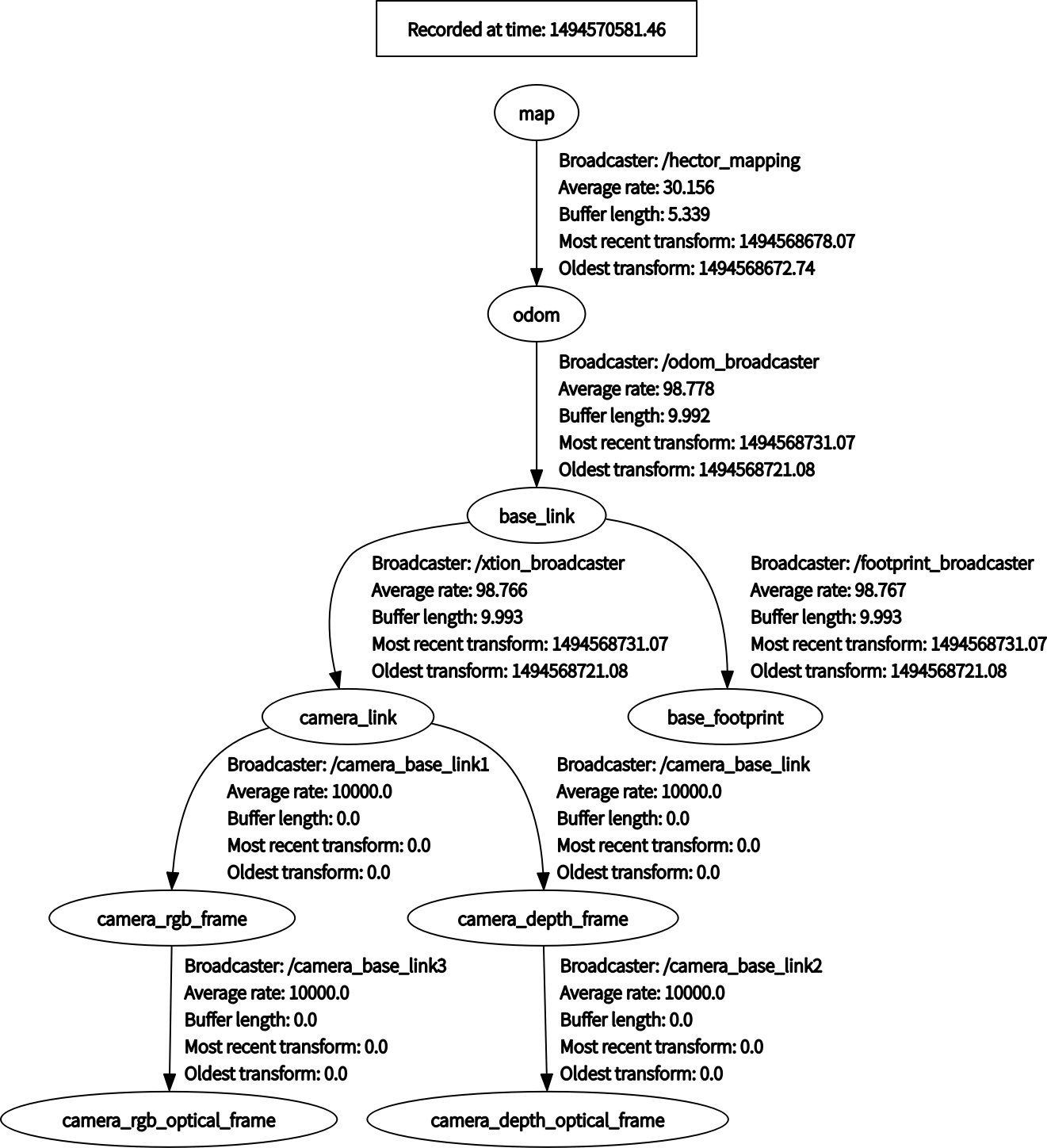
Here is my tf tree:

exit code -11suggest a segmentation fault. Perhaps you can launch the node in gdb and make a backtrace to get some more info on where the error is originating.same problem here, any ideas?