
Differences between ros_control and arbotix driver package
1, I wonder what are the differences or similarities between ros_control and arbotix driver.
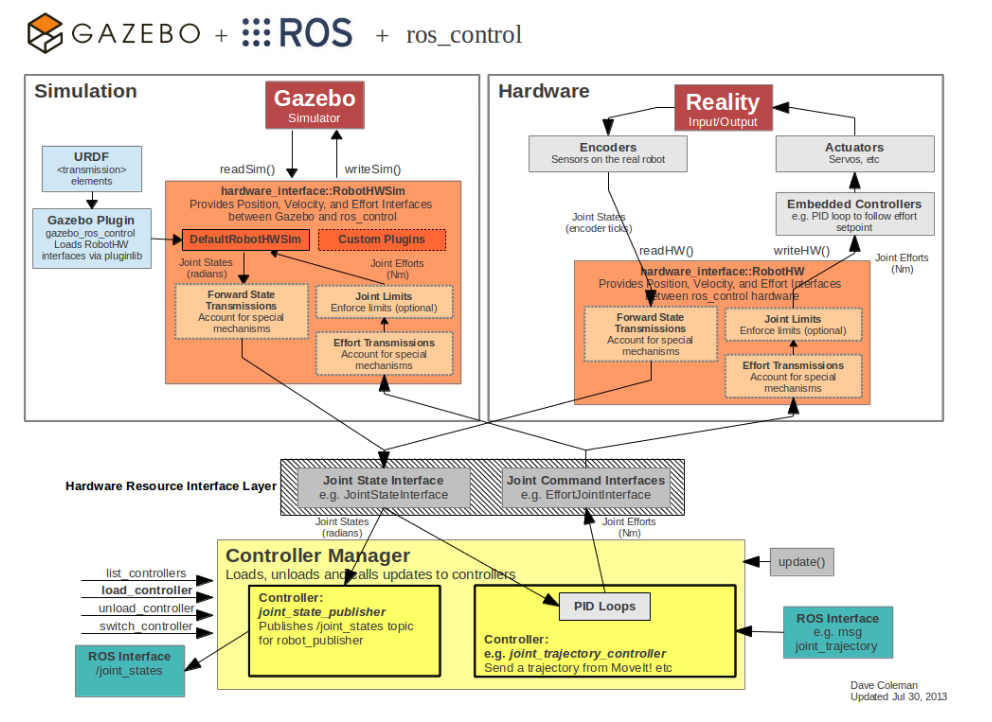
2, Does arbotix driver belong to firmware for harware ? In other words, it belongs to hardware_interface:RobotHW ?
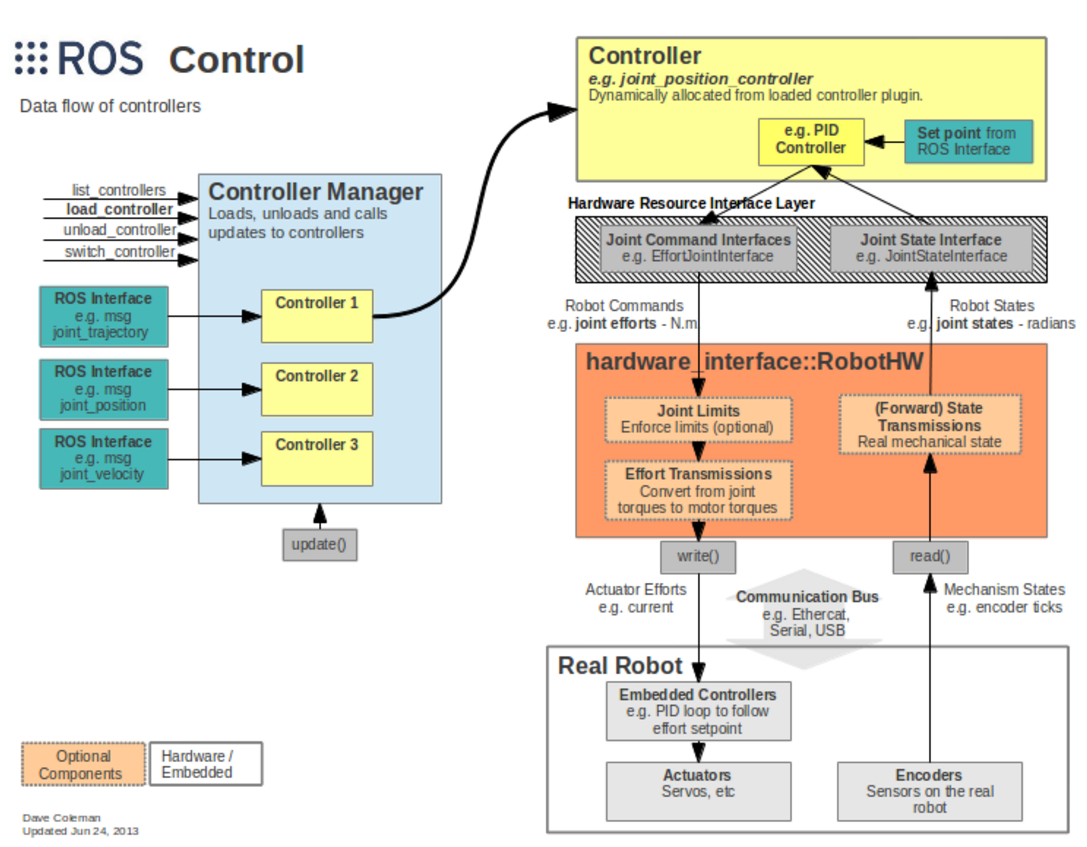
3, ros_control covers the controller_manager and harware resource interface layer ?
add a comment
