
Slam gmapping and hector
Hello!
I'm currently trying to implement a slam using gazebo.
I already have the laser tf publish, as well and the tf between the wheels and the base_link and gazebo publishes the odometry and I think it publishes the tf too.
So i'll put up the questions in order:
1- Why is the map so horrible using gmapping and it's fairly good using hector-slam?
2- My current tf tree using hector is this :
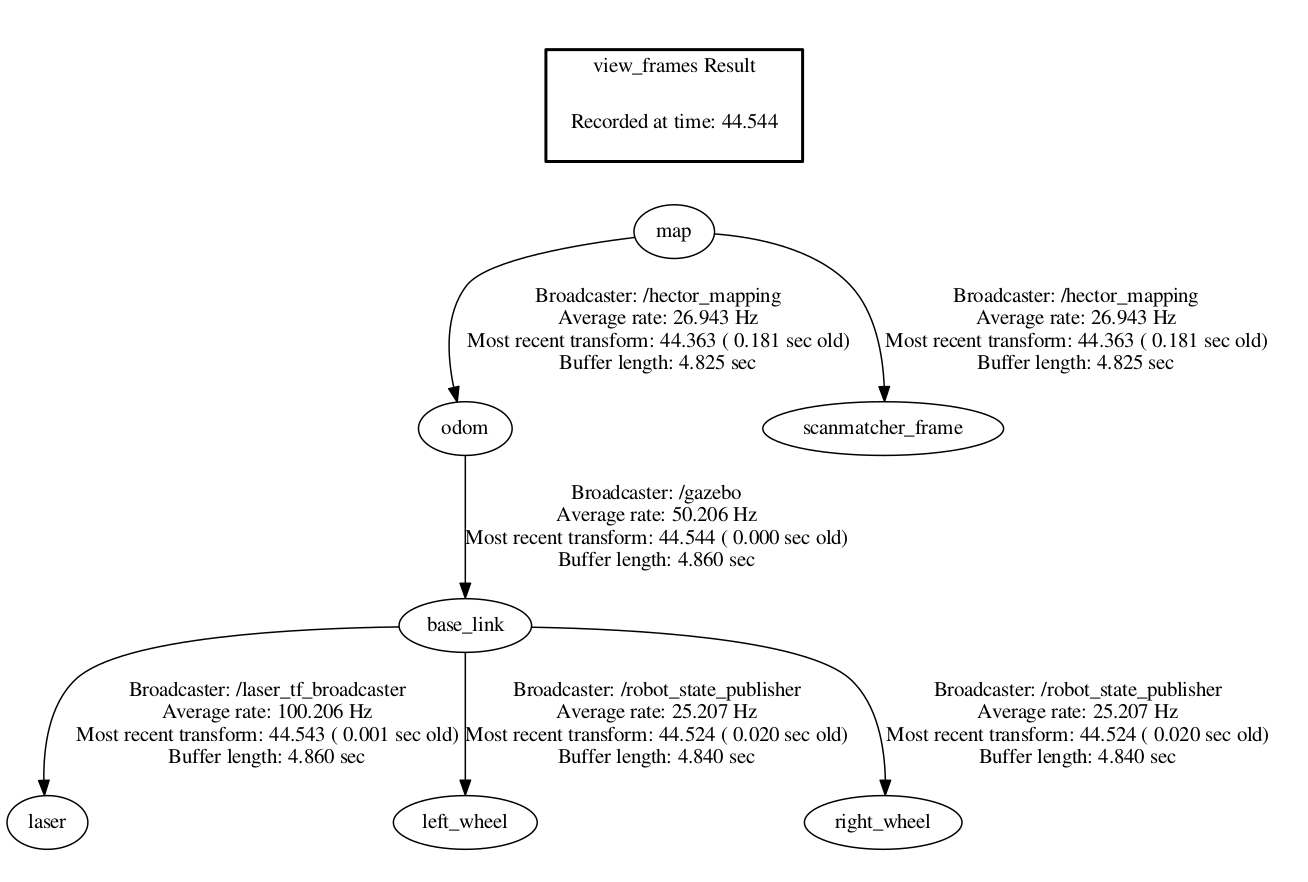 Do I need the transforme between odom->base_footprint->base_link for slam-gmapping to work and why would I need it either way?
Do I need the transforme between odom->base_footprint->base_link for slam-gmapping to work and why would I need it either way?
3-I don't really understand how the odom tf is published. I used the robot_state_publisher node and I know it publishes the wheels tf but does it also publish the odom tf or is it gazebo who does it?
Thanks in advance!

Look at the gmapping documentation for required tf transforms. Gmapping needs base_link transformations.