
Why tf trees for multi-robot system not showing?

Hi all,
I have been building a simple multi-robot system for 3 days referencing to patrolling_sim, which wrap all necessary nodes for a robot in a group tag. I am frustrated to find out the following:
I can run the multi-robot system on Stage_ros with the following TF tree but somehow move_base just can't publish cmd_vel.:

I also wrote a similar launch file for a single robot to run only on Rviz (for future integration on real robots). The TF tree can be displayed and that means proper introspective and outward frame transformations. But if I try to launch this launch files under different robot name (e.g. robot_0, robot_1, etc), then TF trees cannot be published but the nodes are functioning and being published.
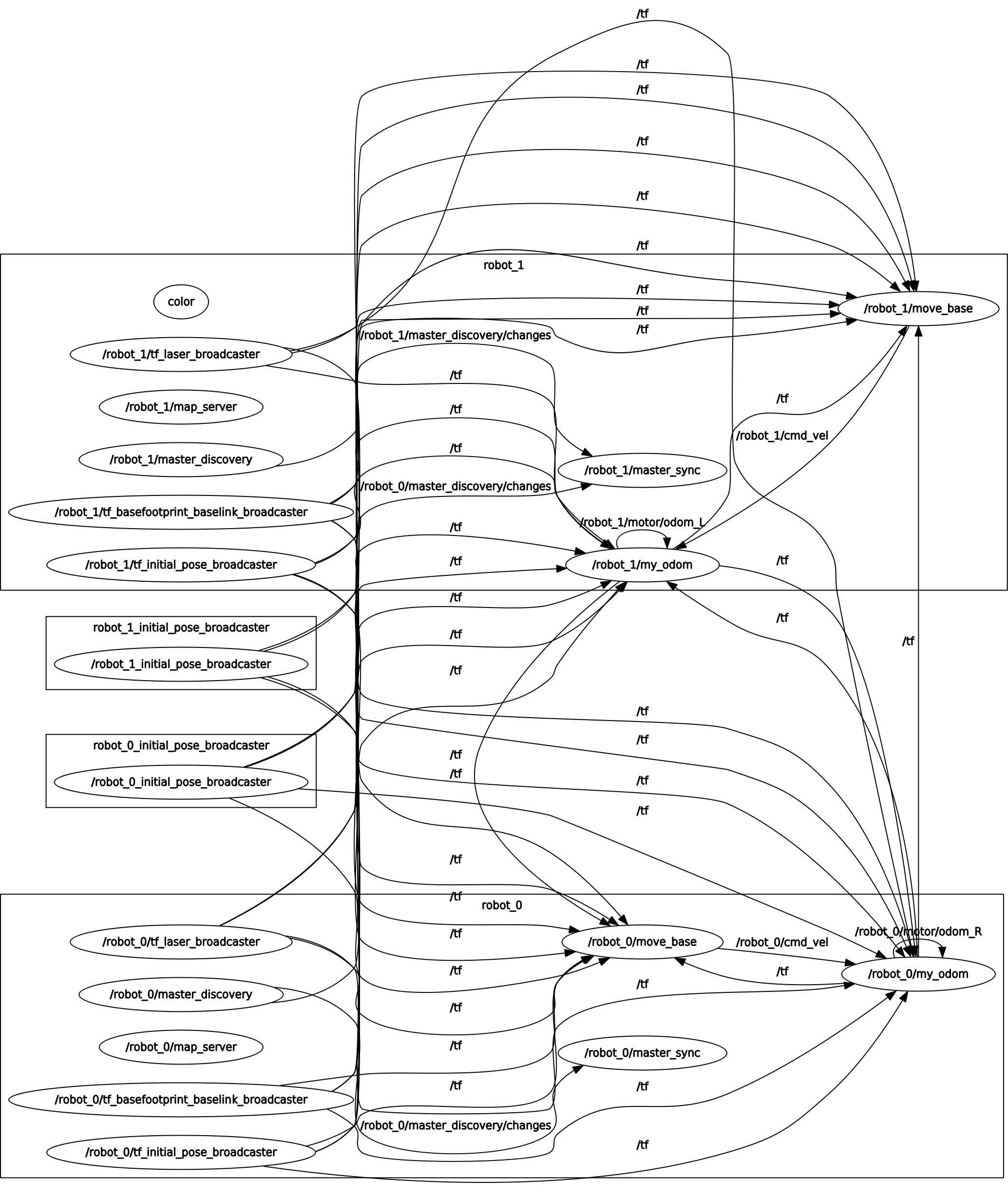
Here is the node graph:
And the TF tree for a single robot:
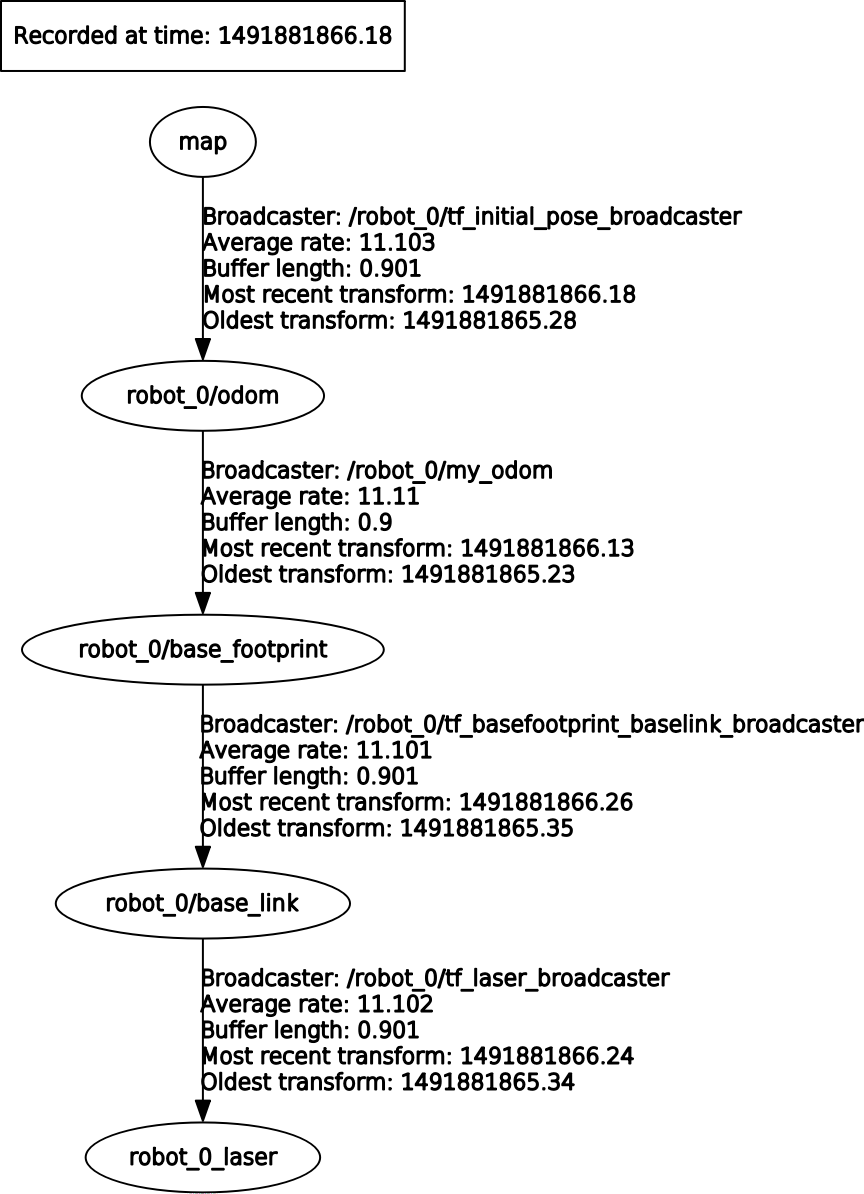
While the TF data cannot be found, Rviz displays the error:
No tf data. Actual Error: Fixed Frame [map] does not exist.
- I suspected that every launch file brings up the nodes under their own ROS master, but it seems that it was not the case.
So my question is, why the robots cannot be launched in the same launch file? What should I do to make the TF tree linked as working with a simulator such as Stage_ros? Please help and thank you in advance !

Per the ROS Support Guidelines marking your post "urgent" is considered rude. I've removed the "urgent" from your post title.
My deepest apology for the ROS community, @ahendrix. I apologize for putting inadequate tag on my title and I will not put any sort of tags in any of my posts. You have my words.
Hi,I am trying to run multi turtlebots on one master. Have you solved this problem? I wonder how did you make your tf tree like the first image? I added <group ns="client1"> and