There is something odd about this bag. I have these errors:
[ WARN] [1490214643.518600329, 1489263072.666895325]: odometry: Could not get transform from camera_link to camera_color_optical_frame (stamp=1489263067.819779) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! Error="Lookup would require extrapolation into the past. Requested time 1489263067.819778998 but the earliest data is at time 1489263072.050056647, when looking up transform from frame [camera_color_optical_frame] to frame [camera_link]. canTransform returned after 0.201633 timeout was 0.2."
When looking at the image msg stamps, they are all before 1489263072! even the last in the bag. The rosbag info:
$ rosbag info 2017-03-11-12-11-06.bagfile
path: 2017-03-11-12-11-06.bagfile
version: 2.0
duration: 23.8s
start: Mar 11 2017 15:11:11.85 (1489263071.85)
end: Mar 11 2017 15:11:35.63 (1489263095.63)
size: 1.5 GB
messages: 8754
Time starts at 1489263071.85 and ends at 1489263095.63. For the messages (293 is the first in the bag and 405 the last):
seq: 293
stamp:
secs: 1489263067
nsecs: 186445665
frame_id: camera_color_optical_frame
... ~100 messages ....
seq: 405
stamp:
secs: 1489263070
nsecs: 919778998
frame_id: camera_color_optical_frame
Note the timestamps are always before rosbag start time. There are also TF frames not linked together:
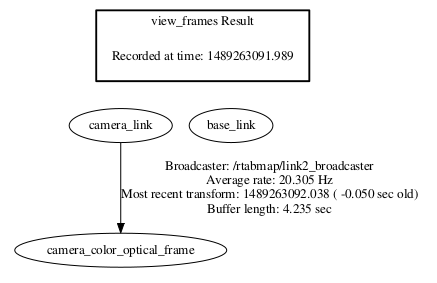
Another problem is that you are outdoor with a RealSense. If depth image is null (all invalid depth pixels), no features can be extracted.

When showing depth values, they are all indeed nulls:
$ rostopic echo /camera/depth/image_raw
header:
seq: 349
stamp:
secs: 1489263069
nsecs: 53112331
frame_id: camera_depth_optical_frame
height: 480
width: 640
encoding: 16UC1
is_bigendian: 0
step: 1280
data: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, ....
Outdoor, I recommend to go with a stereo camera.
cheers,
Mathieu


