
Is my IMU using ENU convention? (for robot_localization)
Hi to all,
I'm using a Razor IMU from Sparkfun and it is the old model SEN-10736 which is compatible with ROS.
I followed all the steps reported on razor_imu_9dof tutorial in order to upload the new firmware and make the IMU work with the razor_imu_9dof ROS driver.
Since I need to use it with robot_localization package, for GPS integration, I would like to know if my IMU heading data start with zero point facing east or not as suggested on the robot_localization tutorial:
Since version 2.2.1, navsat_transform_node has moved to a standard wherein all heading data is assumed to start with its zero point facing east. If your IMU does not conform to this standard and instead reports zero when facing north, you can still use the yaw_offset parameter to correct this. In this case, the value for yaw_offset would be π/2 (approximately 1.5707963).
How can I know if my IMU is already using the correct orientation or not? I took two pictures when facing EAST and when facing NORTH.
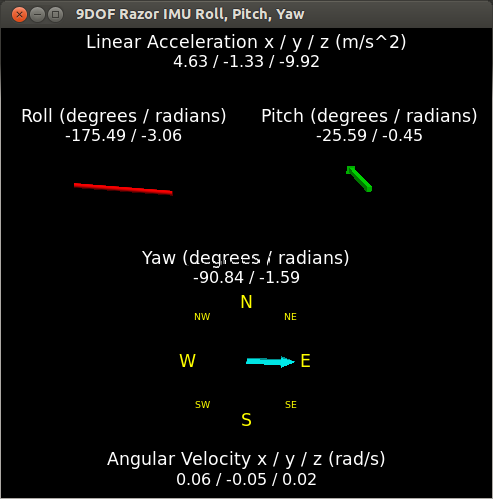

So, I think my IMU reports 0 when facing NORTH. In this case, should I use:
<param name="yaw_offset" value="1.5707963"/>
in my launch file in order to make the IMU outputs 0 when it faces EAST? Is it correct?

