
question about avoiding obstacle

Hi , I am trying to use the navigation stack and every thing is good I have some question and small problem:
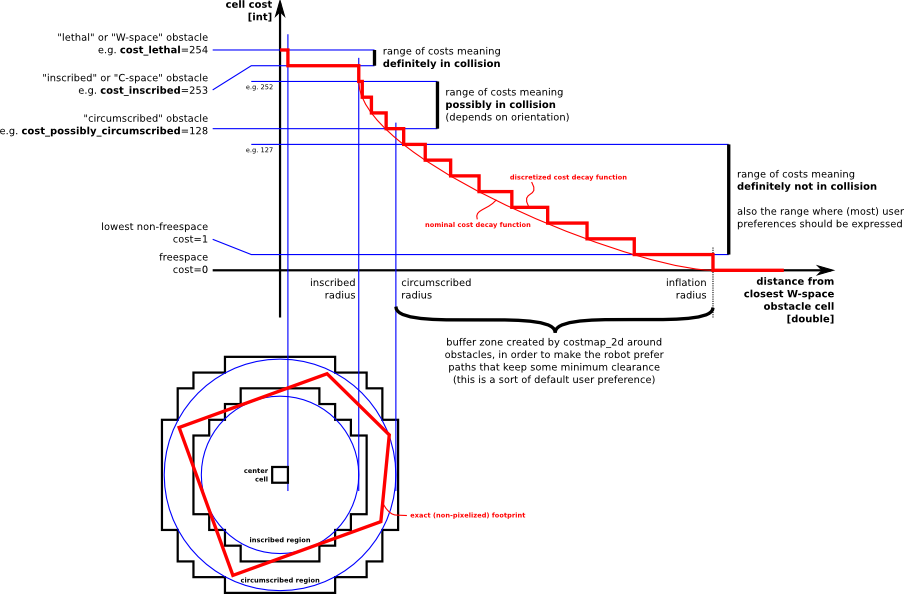
1- Now the inflation radius say that its the maximum distance allowed for the robot from obstacle in the cost map common parameter; my robot radius is about 15 cm but I but it about 23 and inflation radius about 40 cm but still some time enter the inflation zone and some time hit the obstacle I don't know if its problem caused by the parameter above or not.
2- I need to know what cost factor exactly do I didn't understand it good so I hope any one can help.
3- base local planner I didn't use meter_scoring is this will cuse any harm.
I hope some one can make every thing clear to me. Thanks in advance .


please, clarify this statement: "my robot radius is about 15 cm but I but it about 23 and inflation radius about 40 cm"