
moveit rviz cannot display executation
moveit rviz cannot display executation from my own code or rviz command
Here is the rqt_graph for seven_dof_arm_config.demo launch from book, master ros for robotics programming
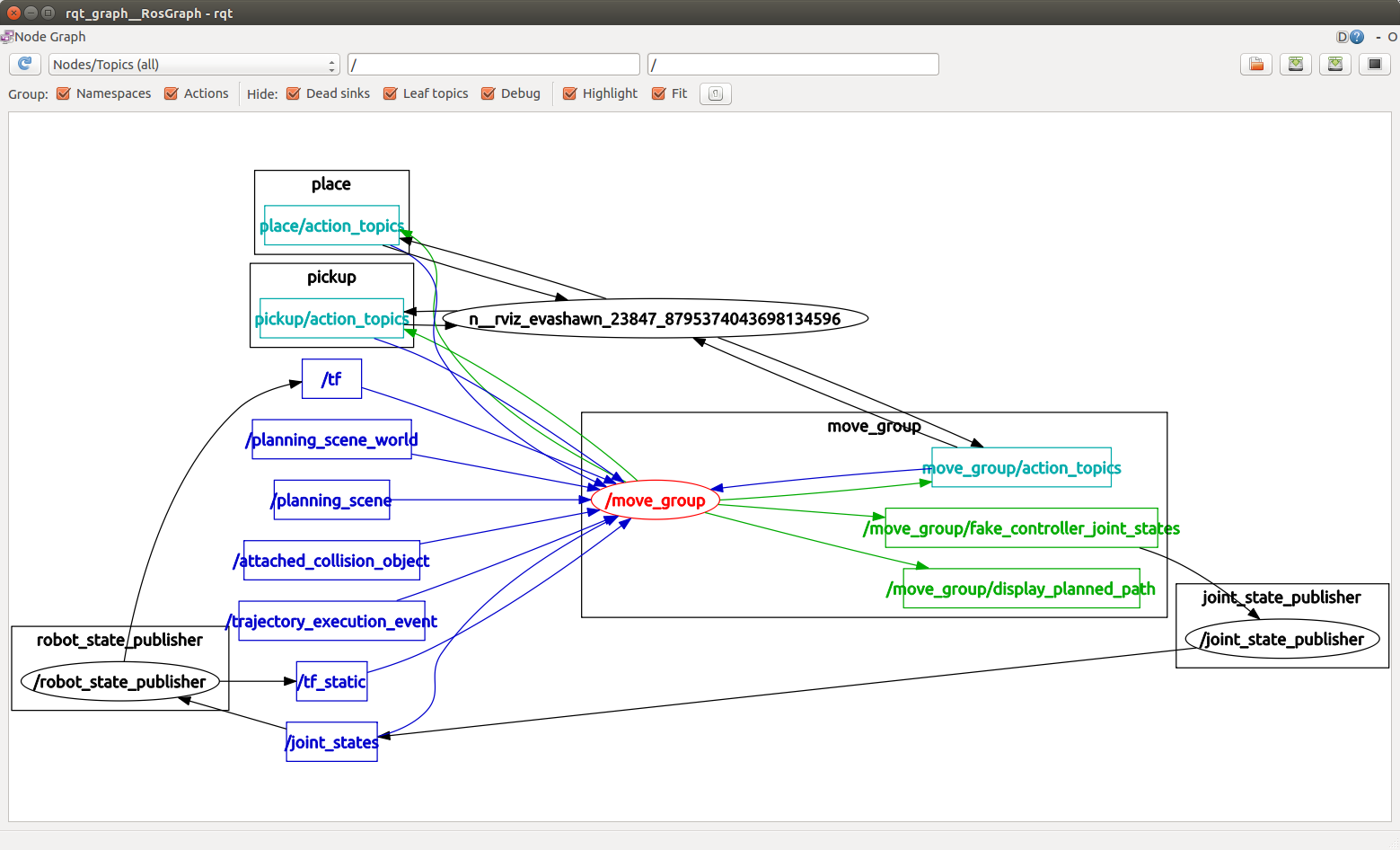
I search solution from google, find someone says he thinks topic /move_group/fake_controller_joint_states is ONLY published with one final joint state message, so rviz ONLY display the final joint state. Here is the link
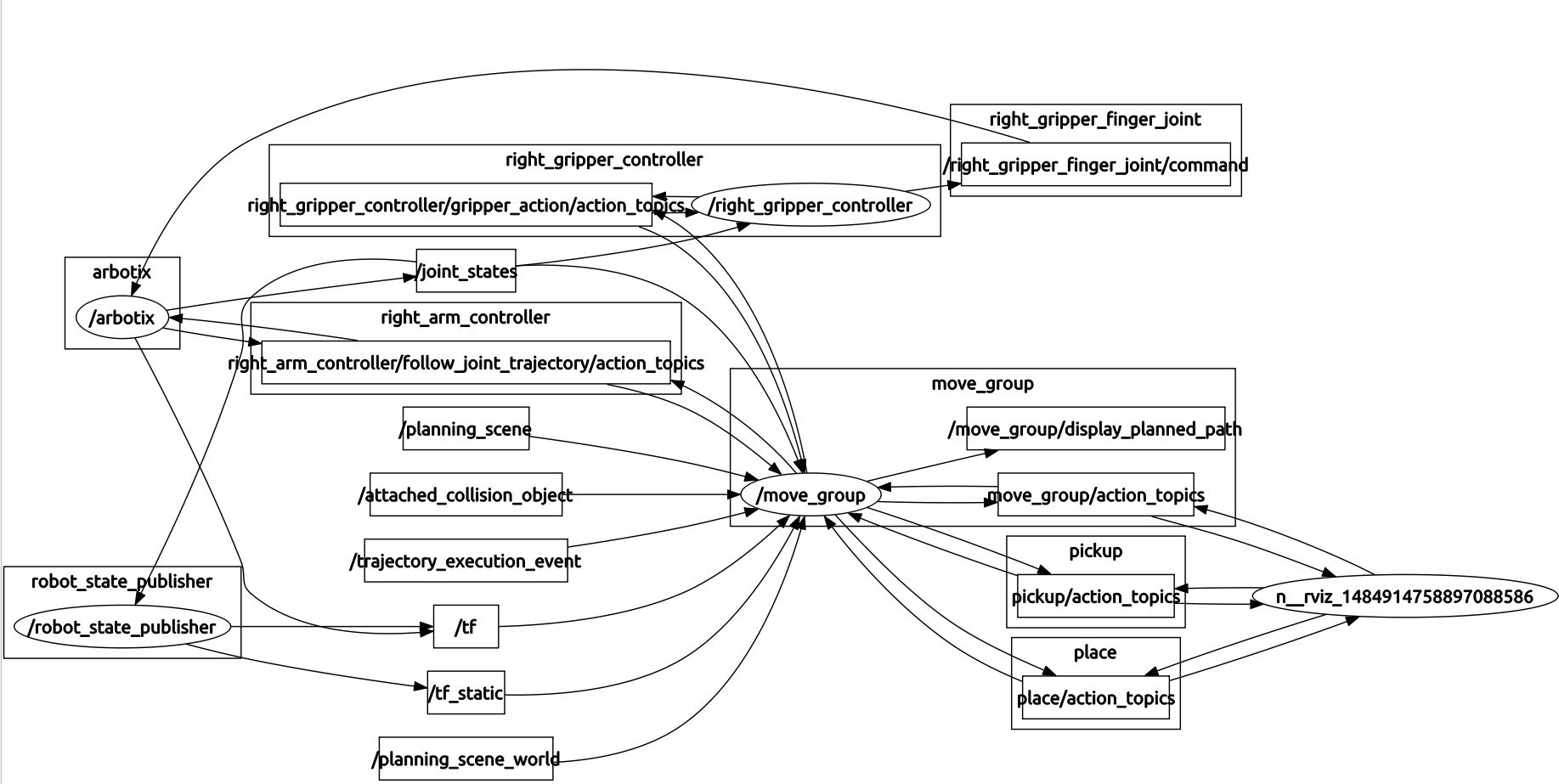
On book, ros-by-example V2, movement of execution of pi_robot can be visualized. I think this is because arbotix controller keeps updating /joint_state, so that rviz keeps updating the movement of pi_robot. Am I right?
Here is the rqt_graph.
How can I visualize the complete movement of execution of the simulated robot?

were you able to visualize it? HAving the same problem!