
can't visualise collision world in rviz with moveit

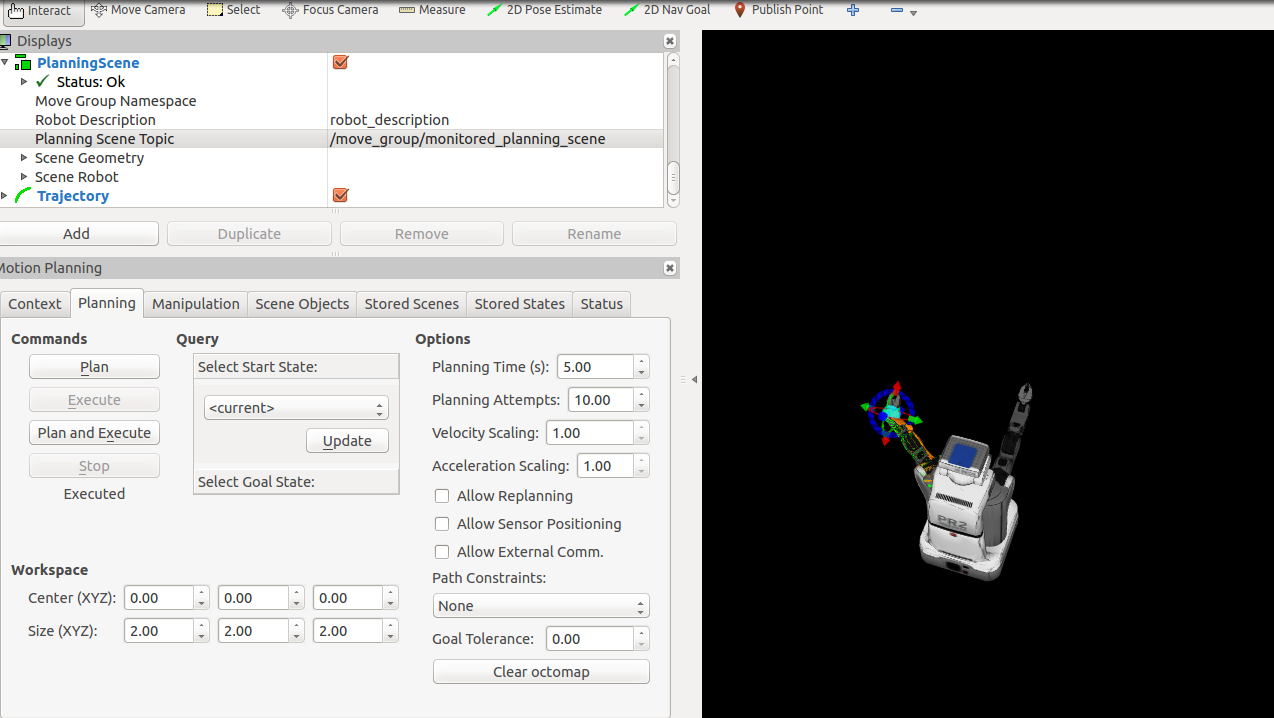
I was following this tutorial, where i was moving the arms of pr2 robot by using moveit motion planner. but when i try to visualise the collision world in rviz nothing is their even after i put objects infront of pr2 robot. Here is my rviz screenshot:
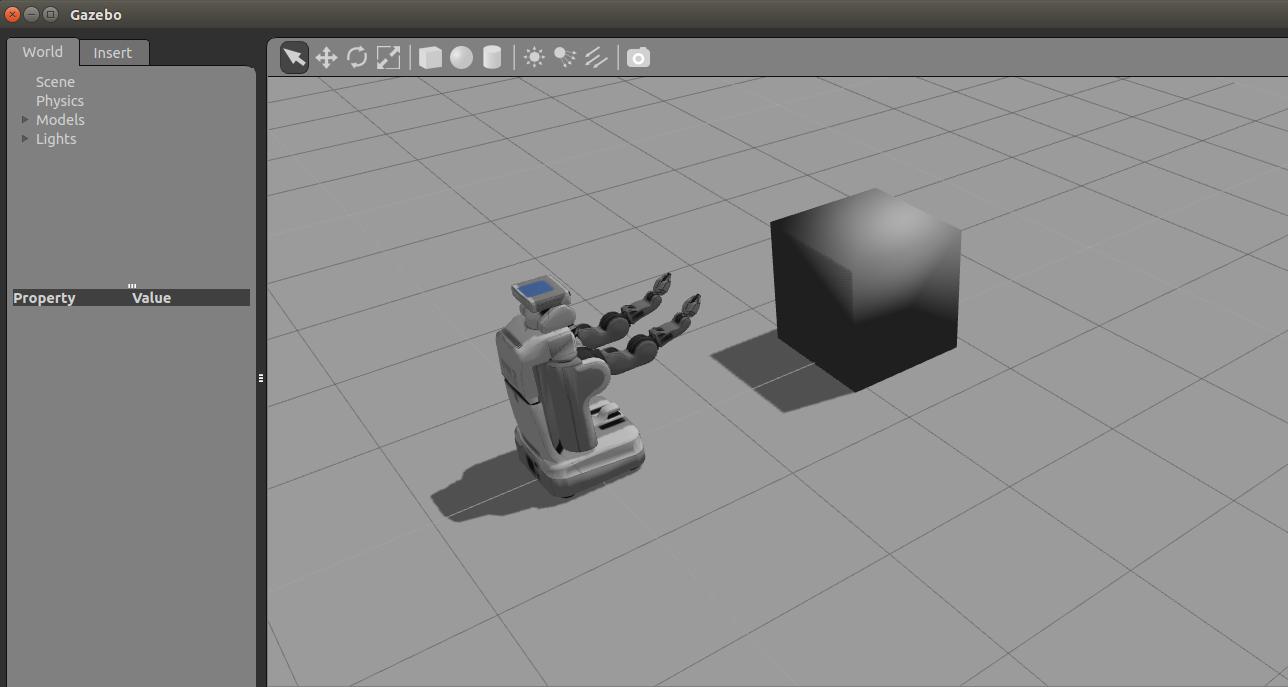
 and here is my gazebo screenshot with a cube infront of it:
and here is my gazebo screenshot with a cube infront of it:
 I have installed ros indigo full and which included gazebo 2 and i also installed pr2 full package. As tutorial said i created all the launch and config files inside the configuration folder of pr2_moveit_config. I was able to run the pr2 in gazebo with moveit and move it by using motion planner but in this step i am stuck.
I have installed ros indigo full and which included gazebo 2 and i also installed pr2 full package. As tutorial said i created all the launch and config files inside the configuration folder of pr2_moveit_config. I was able to run the pr2 in gazebo with moveit and move it by using motion planner but in this step i am stuck.
add a comment
