
Two Robots on a single Roscore
Hello and happy new year :)
I am trying to run Peoplebot and Fetch on the same ROS master. I have attempted to use a tf_prefix so there wouldn't be a conflict in the TF tree. However, when I add the tf_prefix "peoplebot" to the global scope in peoplebot's launch file, I get this error:
[WARN [1483314575.427997796]: Timed out waiting for transform from peoplebot/base_link to map to become available before running costmap, tf error: . canTransform returned after 0.101242 timeout was 0.1.
My questions are:
- Is tf_prefix the right approach for running multiple robots on a single core or is there a cleaner solution I'm overlooking?
- Any suggestions how I can solve this problem? I've been jimmying around with my launch files for over 10 hours now with no avail..
Here is my tf tree before adding the prefix: 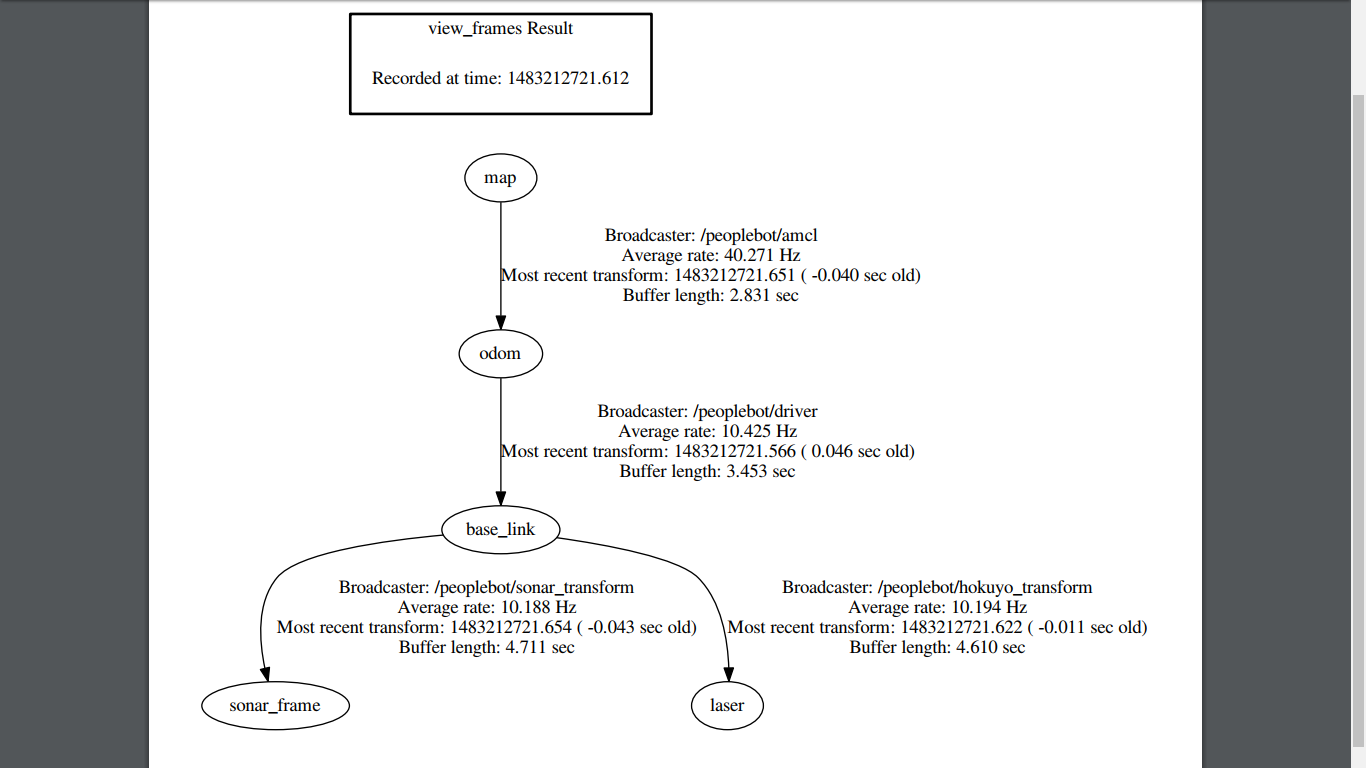
Here is my tf tree, now disconnected, after adding the global tf_prefix="peoplebot": 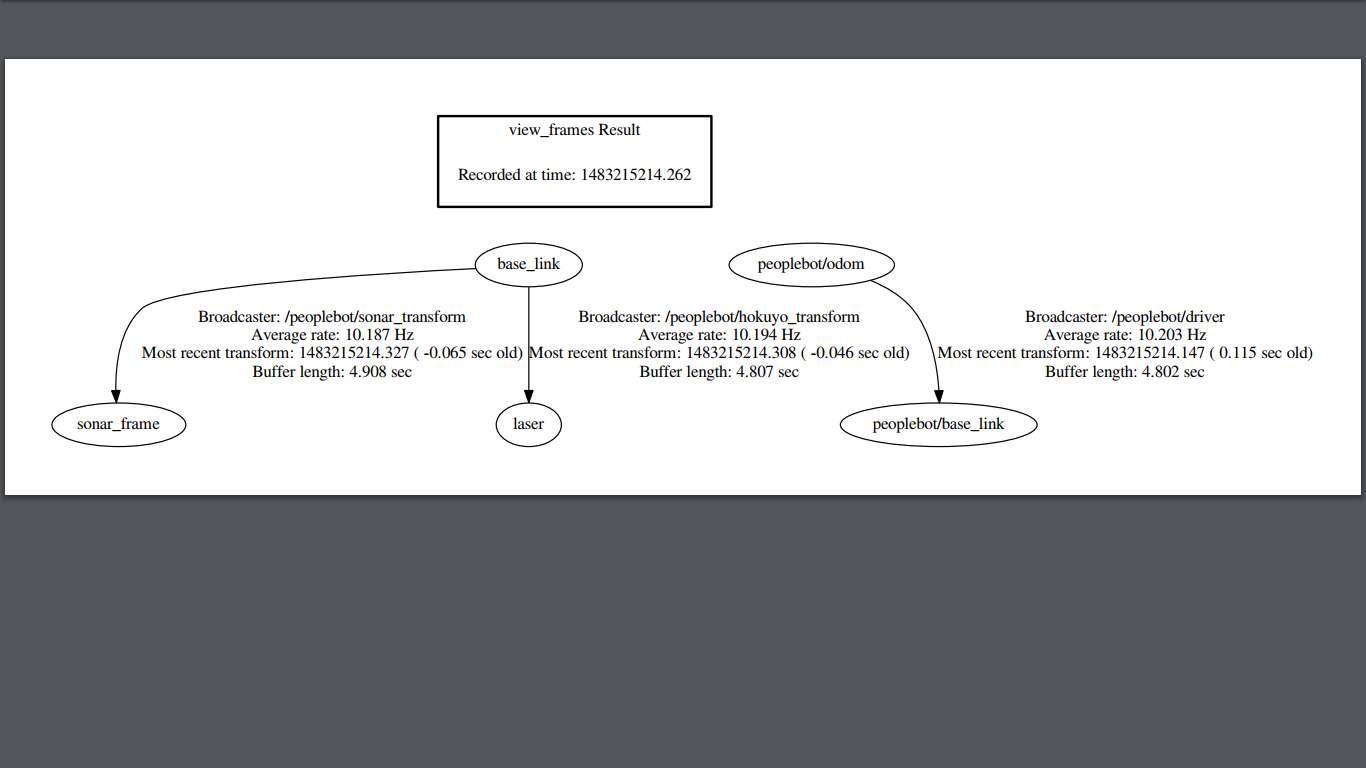
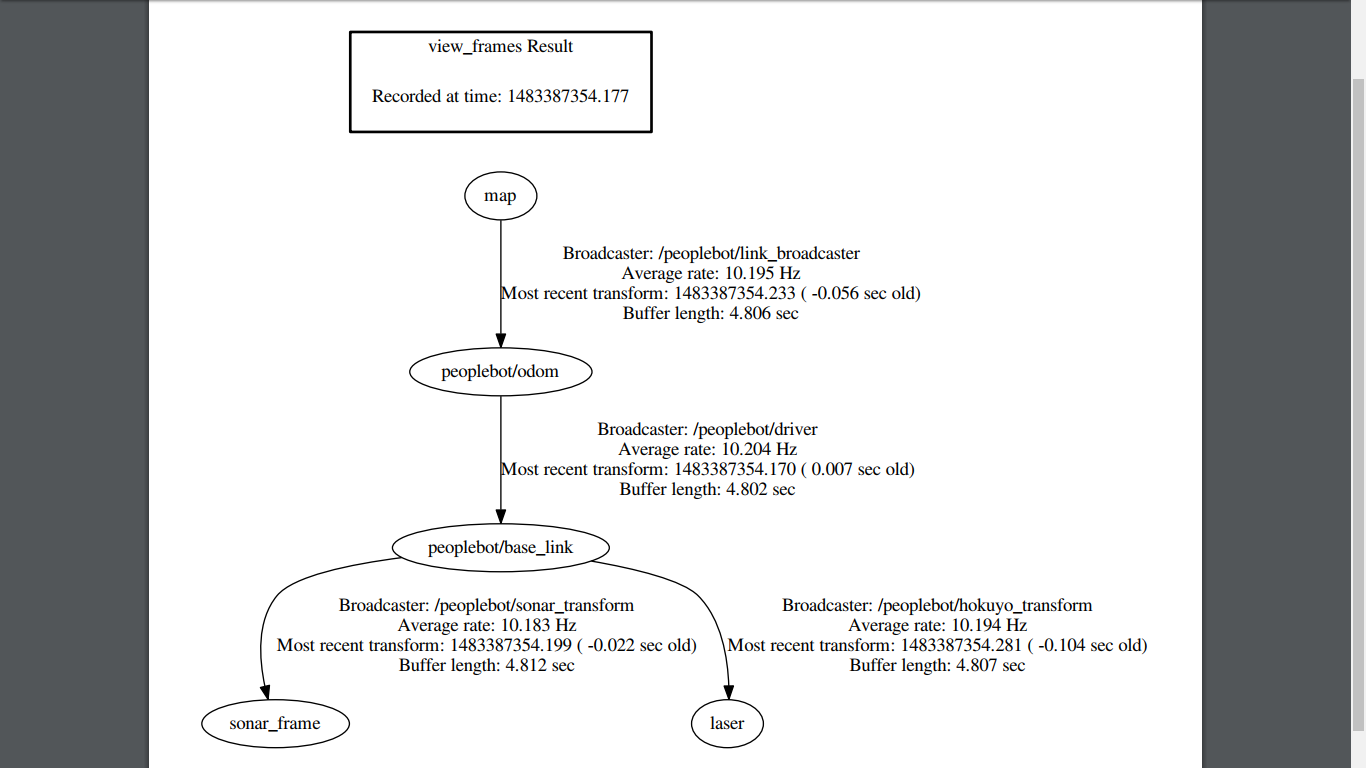
Also, I was able to get the tf tree connected by changing a few other things in the launch file, but still the map doesn't spawn: 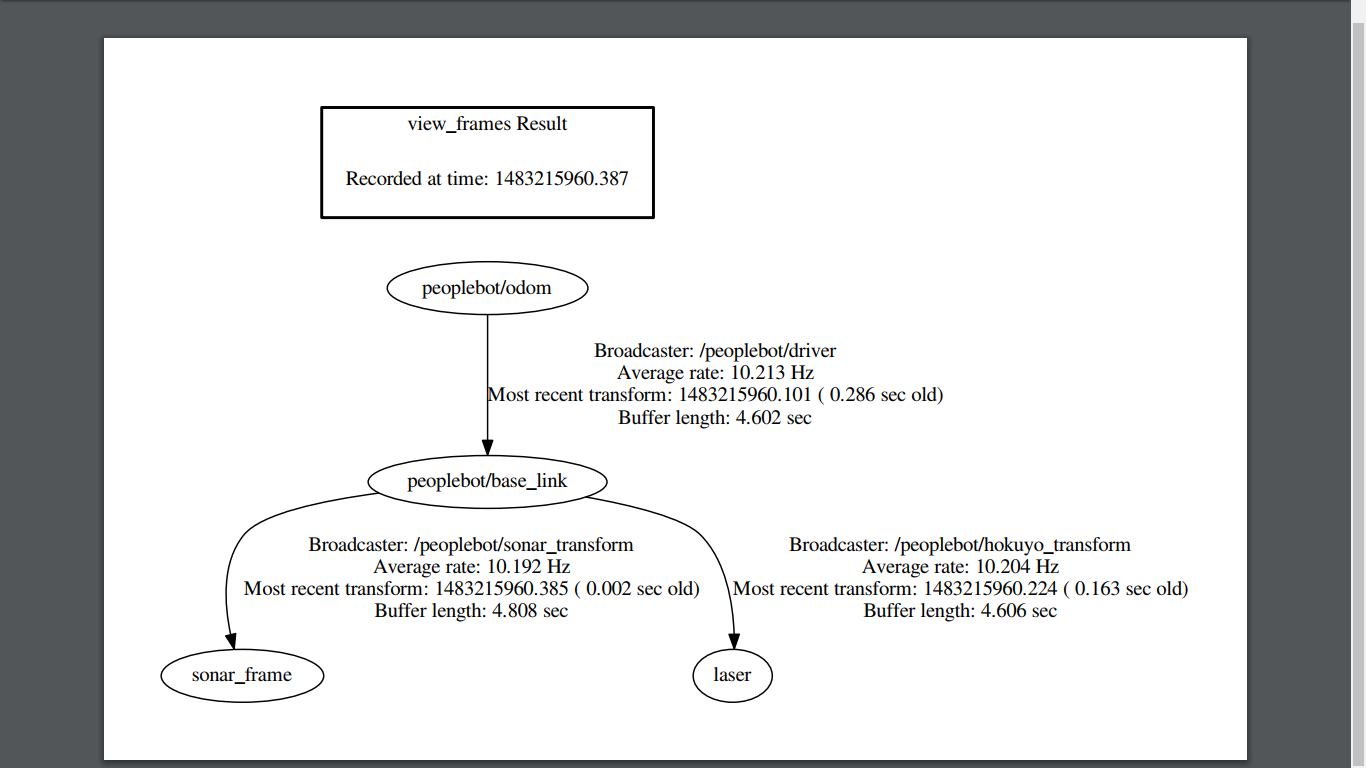
Let me know if there's any other information I can provide. Thanks for your help :)

Could you please make images of your pdfs and then attach them directly to this question? I've given you enough karma to make this possible. Reason I ask is because that will make this question self-contained, maintaining its value even if you delete the files from your google drive.
Thanks.
Thank you for the Karma. I have edited the post!
Cheers