
tf fixed transforms

Hello ROS users,
I'm slightly confused about how TF handles transforms.
I'm using the tf::TransformBroadcaster class in a node called tf_broadcaster_node for publishing transforms to TF, resulting in the following TF tree:
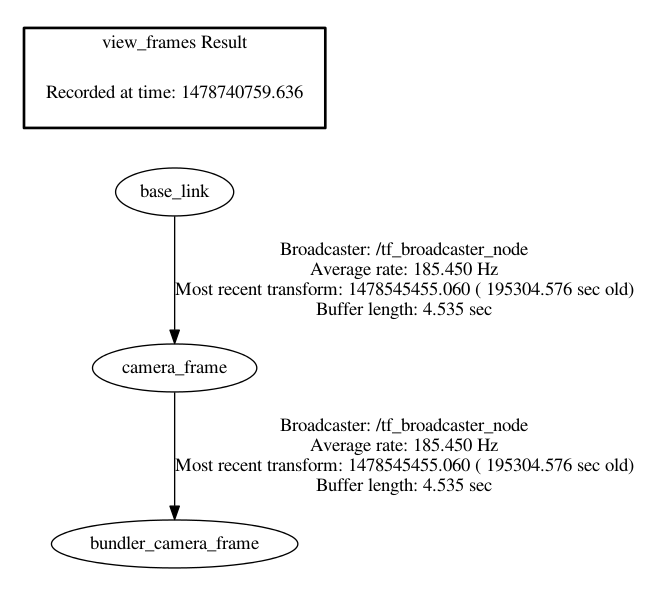
These frames have fixed transforms (only rotations), represented below as RPY(in degrees) :
base_link --> camera_frame: Rotation (-90, 0, 50)camera_frame --> bundler_camera_frame: Rotation is (0, 180, 0)
I also have a tf_listener_node which is used to query and print these transforms from TF. My expectation was that the fixed-value transforms will be printed exactly as defined above. However, I was surprised to note that they were different:
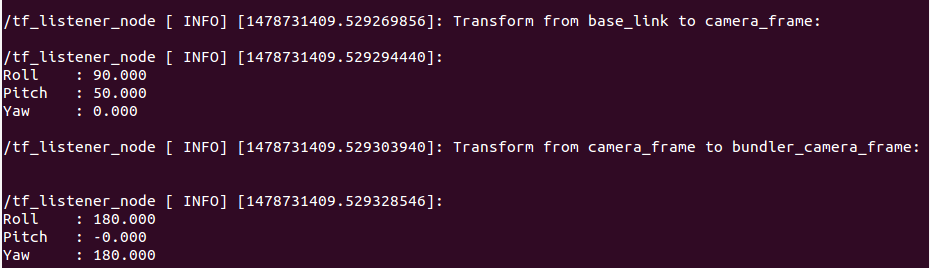
Question : Why do the fixed transform values differ from their definitions?
I'd appreciate any assistance in helping me understand TF better. Thanks!
