
executive_usarsim and teleop issue

I wish to interface ROS-USARSim. and using a interface package executive_usarsim.
It spawn P3AT in USARSim but while running rosrun teleop_twist_keyboard teleop_twist_keyboard.py
P3AT do not move.
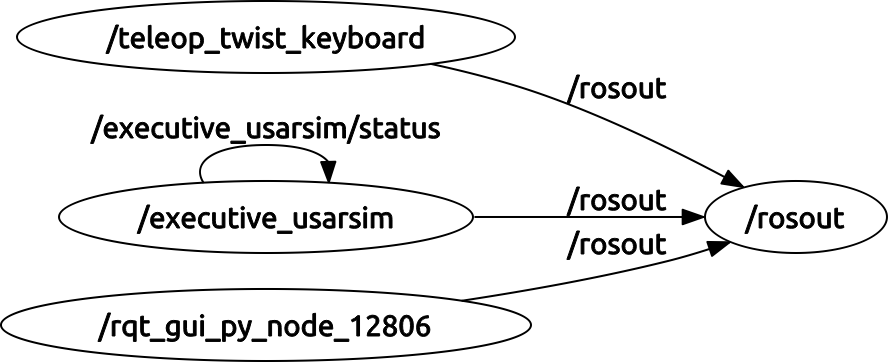
Actually in rqt_graph; executive_usarsim interface donot subscribe twist messages;
Therefore i wish to write a cpp node which can subscribe /cmd_vel topic and publish it on /executive_usarsim/status topic.
please help how to write it in a single cpp file.
Here is rosnode info executive_usarsim
cr-lab-tu@crlabtu-HP-Compaq-8100-Elite-SFF-PC:~$ rosnode info executive_usarsim
--------------------------------------------------------------------------------
Node [/executive_usarsim]
Publications:
* /executive_usarsim/status [std_msgs/String]
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /executive_usarsim/status [std_msgs/String]
Services:
* /executive_usarsim/get_loggers
* /executive_usarsim/set_logger_level
contacting node http://crlabtu-HP-Compaq-8100-Elite-SFF-PC:45055/ ...
Pid: 12463
Connections:
* topic: /executive_usarsim/status
* to: /executive_usarsim
* direction: outbound
* transport: TCPROS
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /executive_usarsim/status
* to: /executive_usarsim (http://crlabtu-HP-Compaq-8100-Elite-SFF-PC:45055/)
* direction: inbound
* transport: TCPROS
and rosnode info teleop_twist_keyboard
cr-lab-tu@crlabtu-HP-Compaq-8100-Elite-SFF-PC:~$ rosnode info teleop_twist_keyboard
--------------------------------------------------------------------------------
Node [/teleop_twist_keyboard]
Publications:
* /rosout [rosgraph_msgs/Log]
* /cmd_vel [geometry_msgs/Twist]
Subscriptions: None
Services:
* /teleop_twist_keyboard/set_logger_level
* /teleop_twist_keyboard/get_loggers
contacting node http://crlabtu-HP-Compaq-8100-Elite-SFF-PC:55529/ ...
Pid: 12620
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
EDIT1:
here is the code i have written to solve the above issue,
#include <ros/ros.h>
#include "std_msgs/String.h"
#include <sstream>
class SubscribeAndPublish
{
public:
SubscribeAndPublish()
{
//Topic you want to publish
pub_ = n_.advertise<std_msgs::String>("/executive_usarsim", 1);
//Topic you want to subscribe
sub_ = n_.subscribe("/cmd_vel", 1, &SubscribeAndPublish::callback, this);
}
void callback(const std_msgs::String::ConstPtr& input)
{
std_msgs::String output;
//output=input;
//.... do something with the input and generate the output...
pub_.publish(input);
}
private:
ros::NodeHandle n_;
ros::Publisher pub_;
ros::Subscriber sub_;
};//End of class SubscribeAndPublish
int main(int argc, char **argv)
{
//Initiate ROS
ros::init(argc, argv, "sub-pub");
//Create an object of class SubscribeAndPublish that will take care of everything
SubscribeAndPublish SAPObject;
ros::spin();
return 0;
}
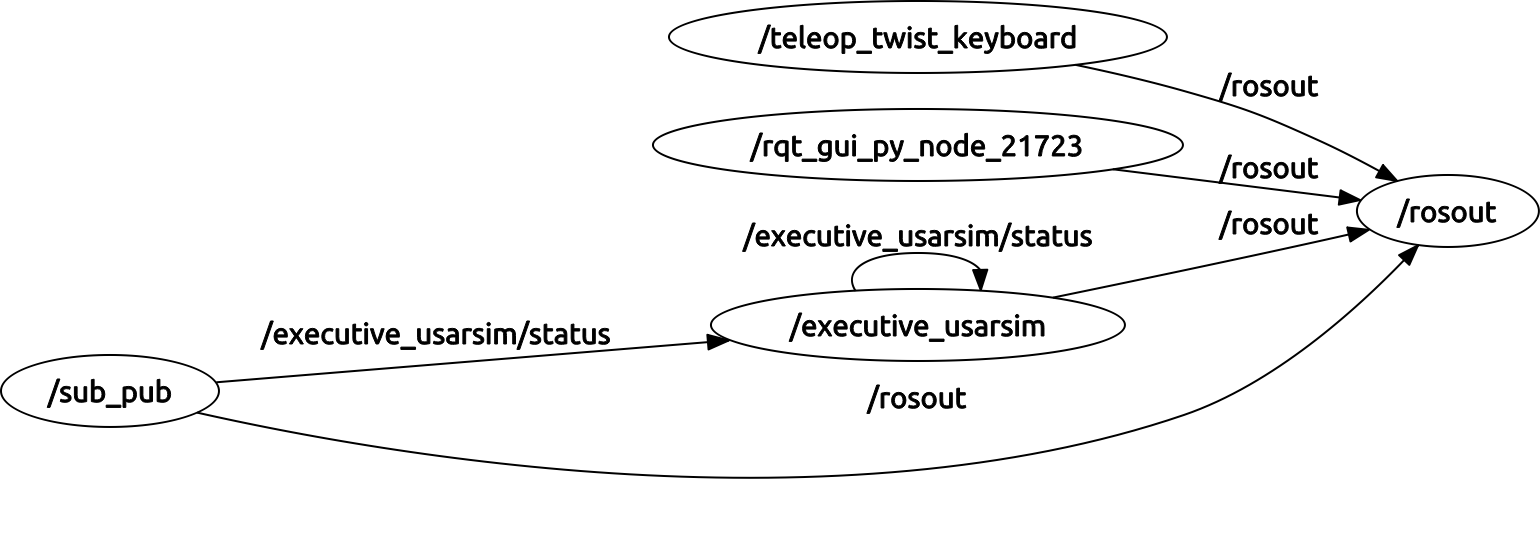
But it is only publishing and not subscribing.
bcrlab@bcrlab-HP-Compaq-8100-Elite-SFF-PC:~$ rosnode info sub_pub
--------------------------------------------------------------------------------
Node [/sub_pub]
Publications:
* /executive_usarsim/status [std_msgs/String]
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /cmd_vel [geometry_msgs/Twist]
Services:
* /sub_pub/set_logger_level
* /sub_pub/get_loggers
contacting node http://bcrlab-HP-Compaq-8100-Elite-SFF-PC:33082/ ...
Pid: 21939
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /executive_usarsim/status
* to: /executive_usarsim
* direction: outbound
* transport: TCPROS
and
bcrlab@bcrlab-HP-Compaq-8100-Elite-SFF-PC:~$ rostopic info \cmd_vel
Type: geometry_msgs/Twist
Publishers:
* /teleop_twist_keyboard (http://bcrlab-HP-Compaq-8100-Elite-SFF-PC:45082/)
Subscribers:
* /sub_pub (http://bcrlab-HP-Compaq-8100-Elite-SFF-PC:33082/)
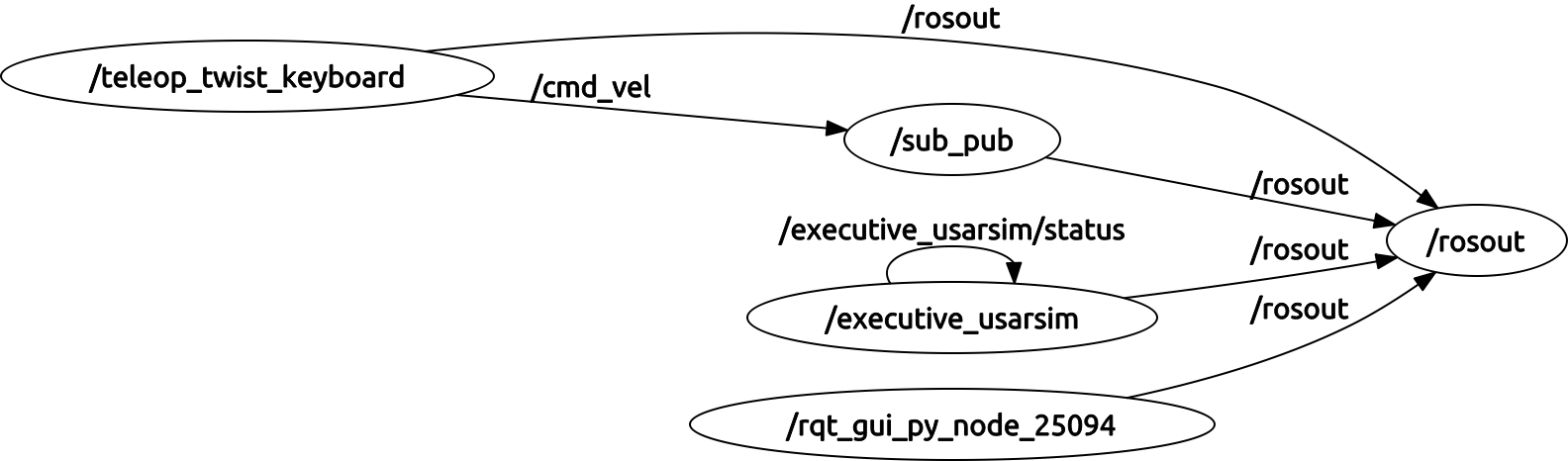
EDIT2:
Here is the updated code which work for me,
#include <ros/ros.h>
#include "std_msgs/String.h"
#include <sstream>
#include <geometry_msgs/Twist.h>
class SubscribeAndPublish
{
public:
SubscribeAndPublish()
{
//Topic you want to publish
pub_ = n_.advertise<geometry_msgs::Twist>("/executive_usarsim/pub_tele", 1);
//Topic you want to subscribe
sub_ = n_.subscribe("/cmd_vel", 1, &SubscribeAndPublish::callback, this);
}
void callback(const geometry_msgs::Twist::ConstPtr& input)
{
geometry_msgs::Twist output;
//output=input;
//.... do something with the input and generate the output...
pub_.publish(input);
}
private:
ros::NodeHandle n_;
ros::Publisher pub_;
ros::Subscriber sub_;
};//End of class SubscribeAndPublish
int main(int argc, char **argv)
{
//Initiate ROS
ros::init(argc, argv, "sub_pub");
//Create an object of class SubscribeAndPublish that will take care of everything
SubscribeAndPublish SAPObject;
ros::spin();
return 0;
}
But now the issue is ...
add a comment
