
The move_base isn't subscribing to /robot1/map

Hello everyone,
I'm trying to add a namespace to my robot. Firstly, I added _${arg robot_name} after all frames. I can control my different robots with rqt_robot_steering via their own control topics, for example, with this /robot1/mobile_base_controller/cmd_vel on gazebo. But I think that isn't important information, whatever;
When I try to run amcl, /robot1/move_base doesn't subscribe to /robot1/map. I'm already remapping in move_base node:
...
<param name="base_global_planner" type="string" value="navfn/NavfnROS" />
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find mrp2_navigation)/config/dwa_planner_params.yaml" command="load" />
<remap from="odom" to="odom_$(arg robot_name)" />
<remap from="cmd_vel" to="$(arg robot_name)/nav_vel" />
<remap from="map" to="/$(arg robot_name)/map" />
</node>
And setting in map_server:
<node name="map_server" pkg="map_server" type="map_server"
args="$(find mrp2_navigation)/maps/milvus_repo.yaml" output="screen">
<param name="frame_id" value="/$(arg robot_name)/map" />
</node>
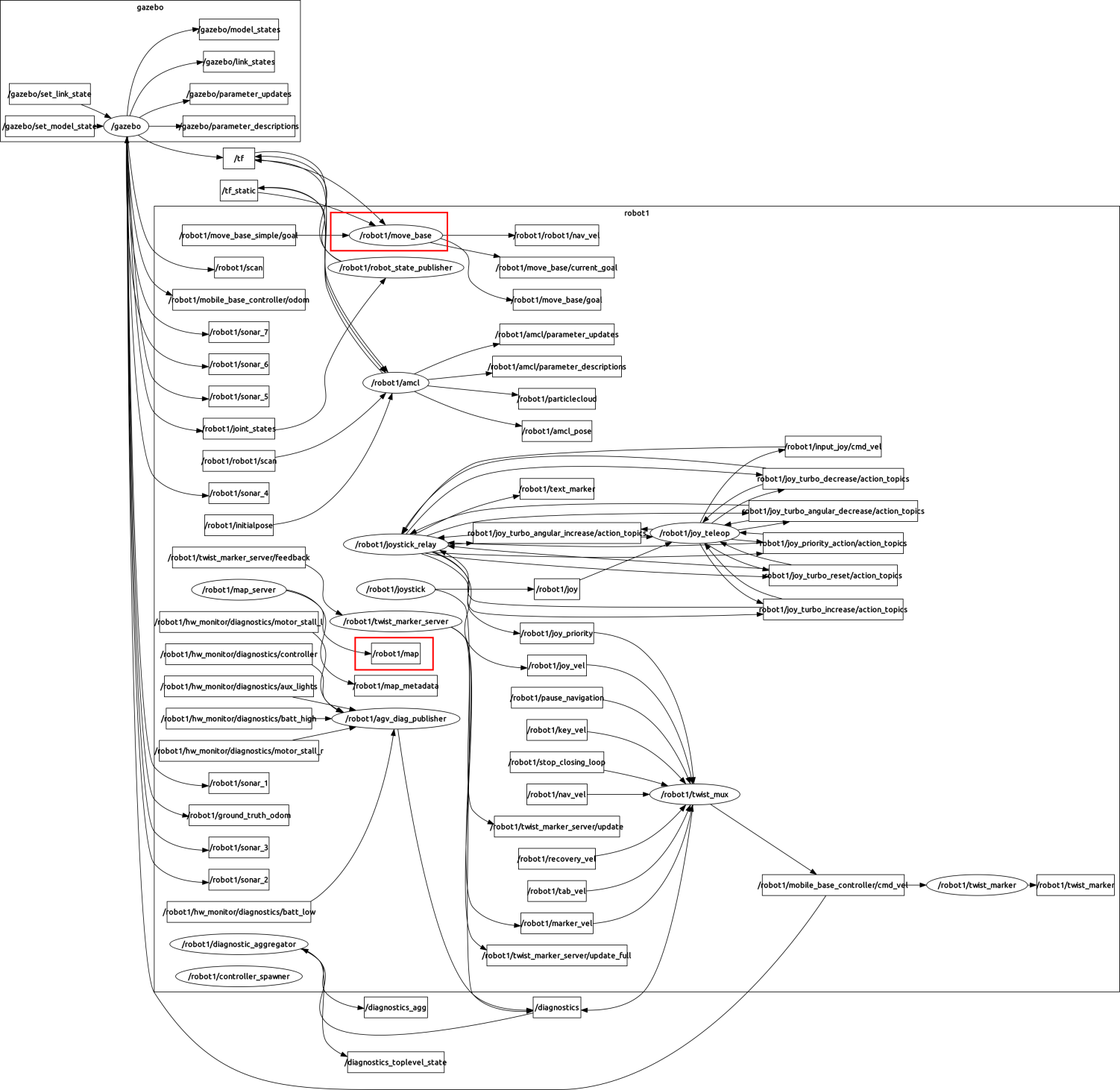
Also Here is rqt_graph output:
(for newcomers to this website: right click image and say "Open image in new tab" for readable resolution)
What should I set? Or What can I do?
Thanks in advance!
add a comment
