
tf tree problem with map->odom->base_link [closed]

Hi,
I have a problem with providing the following relationship "map->odom->base_link" in my tf tree. My question is what changes are necessary to fix this problem. In the below sections I will show what I have done.
I have added the following plugins to the .gazebo file.
<!-- GPS plugin -->
<plugin name="robot_gps_sim" filename="libhector_gazebo_ros_gps.so">
<alwaysOn>true</alwaysOn>
<updateRate>4.0</updateRate>
<bodyName>base_link</bodyName>
<topicName>gps</topicName>
<velocityTopicName>gps_velocity</velocityTopicName>
<drift>5.0 5.0 5.0</drift>
<gaussianNoise>0.1 0.1 0.1</gaussianNoise>
<velocityDrift>0 0 0</velocityDrift>
<velocityGaussianNoise>0.1 0.1 0.1</velocityGaussianNoise>
</plugin>
<!-- Groundtruth plugin -->
<plugin name="robot_groundtruth_sim" filename="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<bodyName>base_link</bodyName>
<topicName>groundtruth</topicName>
<gaussianNoise>0.0</gaussianNoise>
<frameName>map</frameName>
<xyzOffsets>0 0 0</xyzOffsets>
<rpyOffsets>0 0 0</rpyOffsets>
</plugin>
<!-- IMU plugin -->
<plugin name="robot_imu_sim" filename="libhector_gazebo_ros_imu.so">
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<bodyName>base_link</bodyName>
<frameID>robot_link1</frameID>
<topicName>/robot/IMU</topicName>
<xyzOffset>0.0 0.0 0.0</xyzOffset>
<rpyOffset>0.0 0.0 0.0</rpyOffset>
<gaussianNoise>0</gaussianNoise>
<accelDrift>0.5 0.5 0.5</accelDrift>
<accelGaussianNoise>0.35 0.35 0.3</accelGaussianNoise>
<rateDrift>0.0 0.0 0.0</rateDrift>
<rateGaussianNoise>0.00 0.00 0.00</rateGaussianNoise>
<headingDrift>0.0</headingDrift>
<headingGaussianNoise>0.00</headingGaussianNoise>
</plugin>
Here is the tf tree:
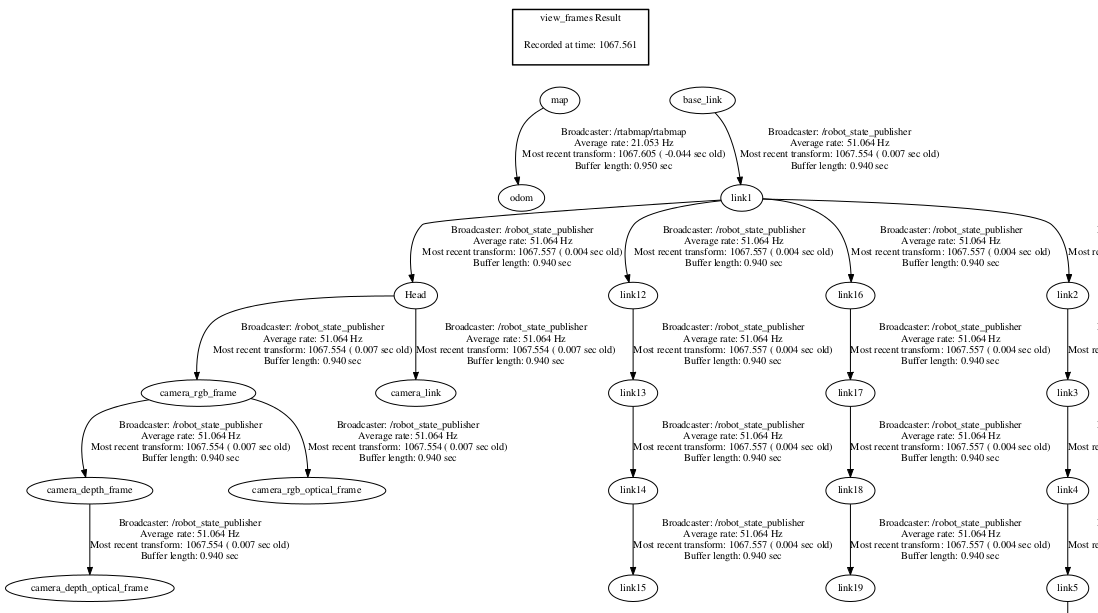
I ran the gmapping node. So because of this node, there is a connection between odom and map links. But there is no connection between odom and base_link.
I also tried to add a node to make the connection between these two links, but when I do rosrun tf view_frames nothing changes.
Edit: I realized that the transform from odom to base_link is computed and broadcast by one of the odometry sources. So, I modified the following node. Now, when I do "rotopic echo odom", the information is getting updated correctly, but there is still no link between odom and base_link. Actually, I tried to do something similar to this link. If I run it , the link between base_link and odom is provided, but I don't know what is wrong with my code that doesn't make the connection between link.
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
class OdomTf{
public:
OdomTf();
void getInfo(const nav_msgs::Odometry::ConstPtr& msg);
ros::Time current_time;
void publishOdom();
nav_msgs::Odometry odom;
private:
ros::NodeHandle nh_;
ros::Subscriber data_sub_;
ros::Publisher data_pub_;
};
OdomTf::OdomTf(){
data_sub_ = nh_.subscribe("groundtruth", 1, &OdomTf::getInfo, this);
data_pub_ = nh_.advertise<nav_msgs::Odometry>("odom", 10);
}
void OdomTf::getInfo(const nav_msgs::Odometry::ConstPtr& msg)
{
tf::TransformBroadcaster odom_broadcaster;
geometry_msgs::TransformStamped odom_trans;
current_time = ros::Time::now();
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = msg->pose.pose.position.x;
odom_trans.transform.translation.y = msg->pose.pose.position.y;
odom_trans.transform.translation.z = msg->pose.pose.position.z;
odom_trans.transform.rotation.x = msg->pose.pose.orientation.x;
odom_trans.transform.rotation ...

How did you estimated state of robot? The creating link between
odomandbase_linkis job of localization node. It may berobot_pose_ekfor it will be controller's node directly: just set/mobile_base_controller/enable_odom_tftotrue.@Orhangazi44 For localizing the robot, I've used gmapping. I am using gazebo, and I want to see the changes of the coordinate frames for each joint in Rviz as my legged robot walks in gazebo. I am using ros_control for gazebo, so I think I can't use the option you said. Do you know what I should do?
You probably running via
controls.launchfile. And probably withcontrols.yamlfile. Changeenable_odom_tfparameter incontrols.yaml. If you are not, try adding these files to you structure. Here is examples in following comments:<node name="controller_spawner" pkg="controller_manager" type="spawner"args="mrp2_joint_publisher mobile_base_controller --shutdown-timeout 1" />@Orhangazi44 Thanks. I am using control.launch with control.yaml file. I think I need to add enable_odom_tf option somewhere. I haven't done it before.
@Orhangazi44 is
enable_odom_tfpart of a controller driver for wheeled robots? Can I use it for legged robots?I don't know, We are using this parameter to creating transform between
base_footprintandodomfor wheeled robots. But I think it must be work. Because other transformations are ok withbase_link.@Orhangazi44@MahsaP a minor correction: typically, the tf
odom->base_linkcomes from the base controller of the robot, not the localization. localization reads this tf.odom->base_linkis what the robot thinks it has moved based on motor encoders