
Gmapping tf problem
Hi,
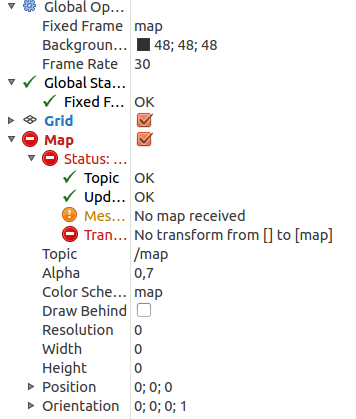
We are having problems with Gmapping. We are using a OMD10M-R2000 range finder and are getting odometry via RS232 from the robot. In RViz we get the following error: No transform from [] to [map]
when we start Gmapping with following launch file we get a warning: [ WARN] [1461833120.053747916]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
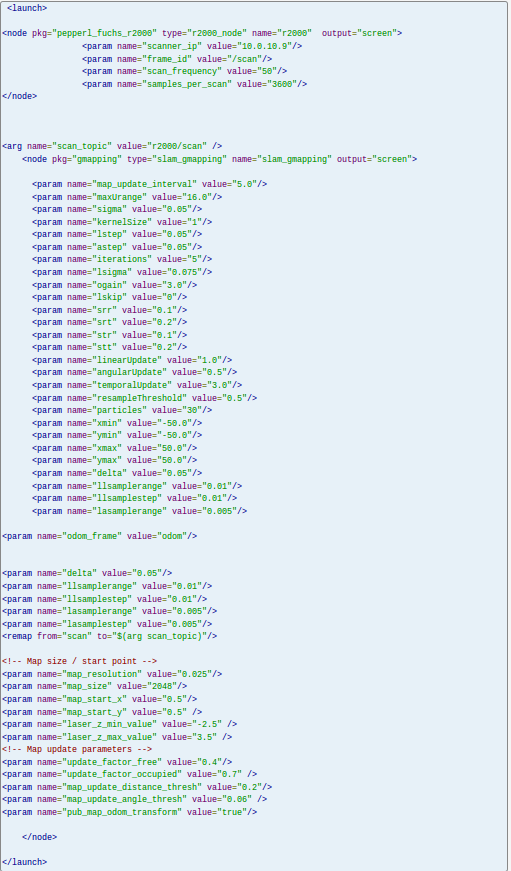
launch file: EDIT: old launch file
<launch>
<node pkg="pepperl_fuchs_r2000" type="r2000_node" name="r2000" output="screen">
<param name="scanner_ip" value="10.0.10.9"/>
<param name="frame_id" value="/scan"/>
<param name="scan_frequency" value="50"/>
<param name="samples_per_scan" value="3600"/>
</node>
<arg name="scan_topic" value="r2000/scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="odom_frame" value="odom"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.025"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value="-2.5" />
<param name="laser_z_max_value" value="3.5" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<param name="pub_map_odom_transform" value="true"/>
</node>
<param name="robot_description" command="cat $(find urdf_agv)/src/my_agv.xml" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="tf_broadcaster" pkg="urdf_agv" type="tf_broadcaster" />
</launch>
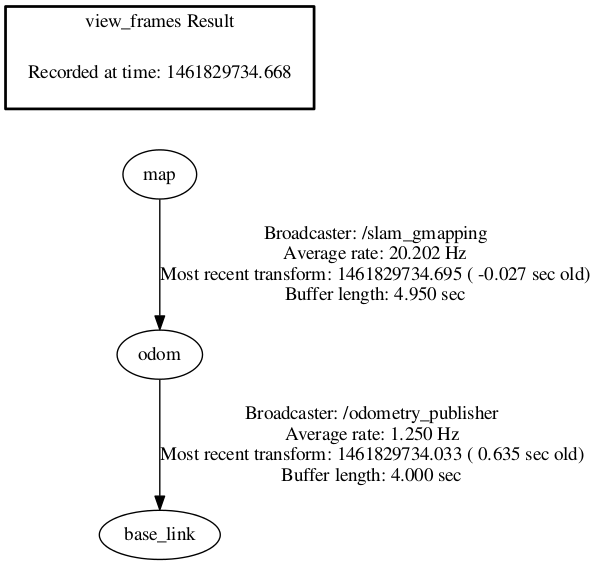
Our tf tree looks like this: map->odom->base_link EDIT: old tf tree 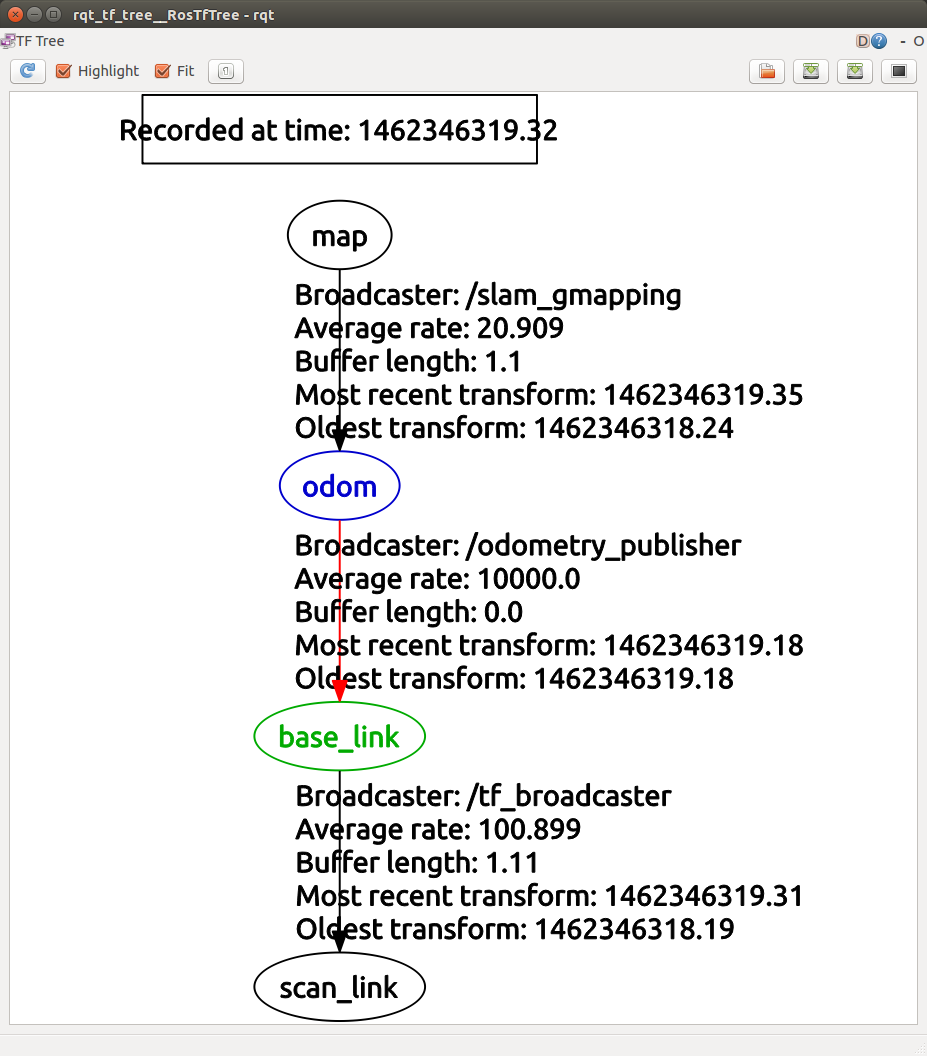
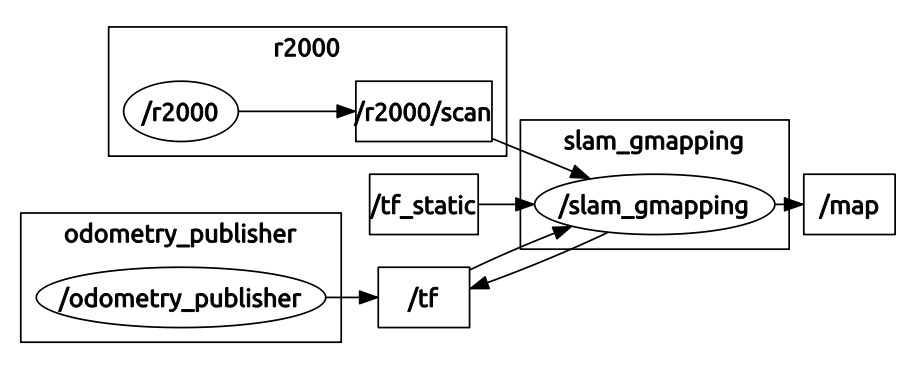
Our rqt_graph:

Greetings,
Stijn
[EDIT] URDF file:
<robot name="agv">
<link name="base_link" />
<link name="scan_link" />
<joint name="joint1" type="continuous">
<parent link="base_link"/>
<child link="scan_link"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="0 0 0" />
</joint>
</robot>
add a comment


{kind=link}
{kind=link}
{kind=link}