
pointcloud .pcd in rviz - transformation problem
Hello guys, with another program I obtained my pointcloud and saved in a .pcd file. Now I'm trying to insert the pointcloud into the ros visualizer. I did the program and everything works fine. The only problem is that the cloud is a weird positon (as shown in the image below):
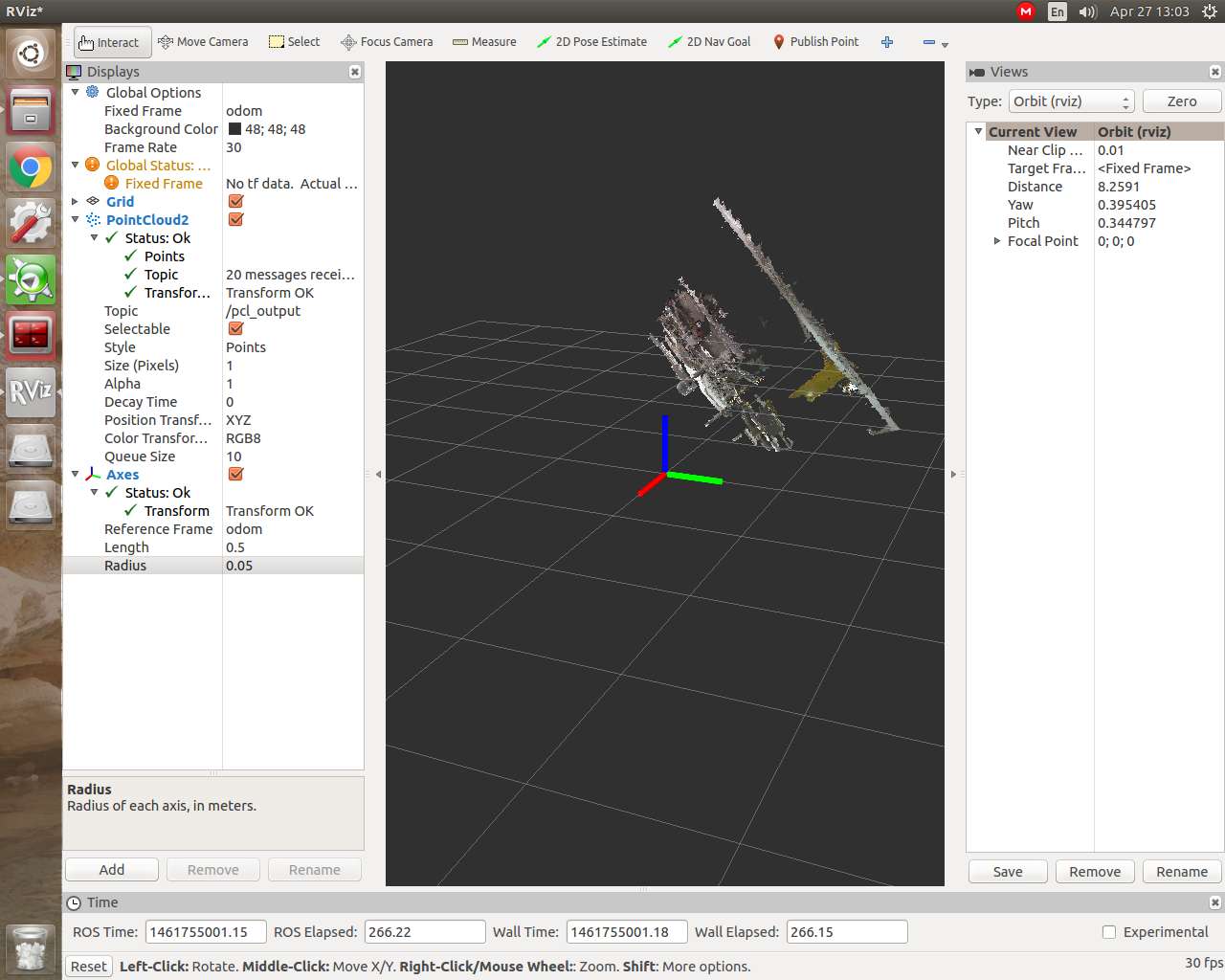
the right-up part should be the floor. How can I do for making a right transformation and put the pointcloud in a right way?


Are you publishing it with the correct tf frame?
well i don't know I followed a tutorial for importing the point cloud on rviz! the point are taken respect to the kinect that is on the gripper of the robot