
IMU Values jumping around
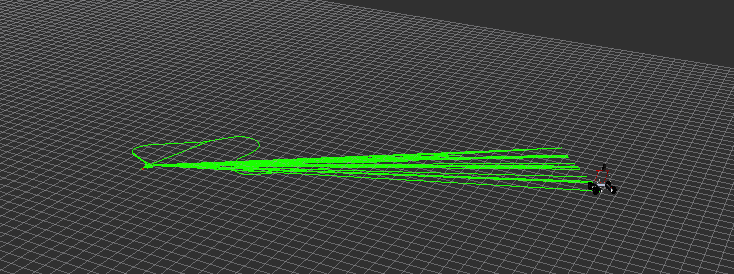
I am currently using the robot_localization node in order to fuse together wheel odometry and IMU odometry. The Wheel odometry looks okay but once I add in the IMU data the vehicle starts to jump around when I watch the pose in rviz. I used the hector_trajectory node to track the pose and it make the error pretty clear. I am not sure what could be causing it. Here is the trajectory that was traced.
My system is setup so that the rover base frame is /base_frame the wheel odometry is reported from the /odom frame. The IMU data is being reported from an /imu frame which has a fixed translation transform from imu -> base_frame with a transform of x=0, y=0, z=0.
The first part of the path is without IMU data present in the system.


Can you post sample input messages and your
r_lconfig?