
Network data loss using 4 robots
I have a group of four robots. Right now I am doing testings on the data transmission over a wireless network, the output of rqt_graph is shown below.
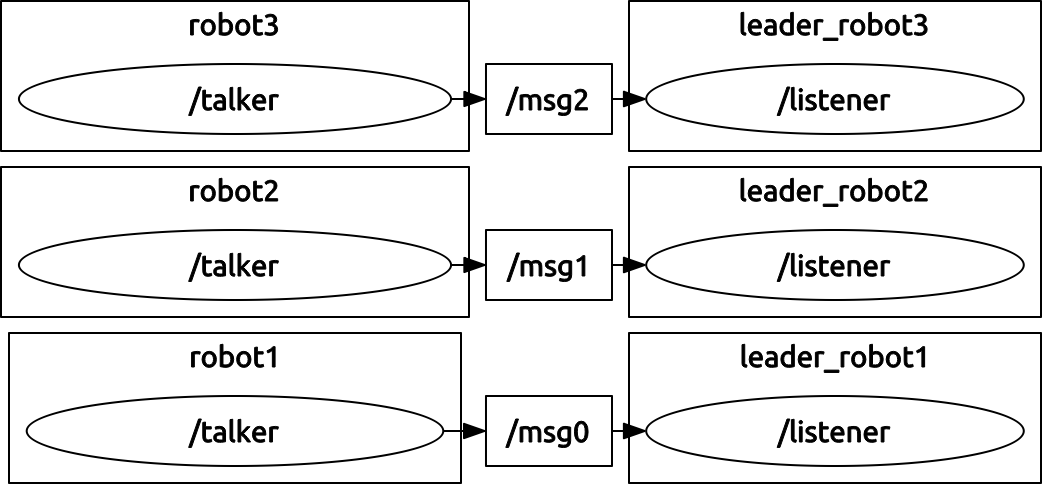
- Robot 1, 2 and 3 are different robots sending a message.
- Leader 1, 2 and 3 are the same leader robot running the listener 3 times.
So, I have 4 robots, 3 sending, 1 receiving. I want my application to be as real time as possible. I am running at 30 Hz. First I tough to put nothing on the stack, so the data I receive is always the newest one, the publishers and subscribers are set with a stack size of 1, but with that I lose a lot of data. The output is shown below:
Machineis the robot sending dataMessageis the message number receivedCounteris the message number expected
I print out whenever Message and Counter are different and at every second.
[ INFO] [1458884633.094665493]: Machine <0> Message<150>
[ WARN] [1458884633.249164663]: Machine <1> Message<188> Counter <186>
[ WARN] [1458884633.249326863]: Machine <1> Message<192> Counter <189>
[ INFO] [1458884633.261020475]: Machine <2> Message<270>
[ WARN] [1458884633.367932119]: Machine <0> Message<154> Counter <152>
[ WARN] [1458884633.368090775]: Machine <0> Message<158> Counter <155>
[ WARN] [1458884633.619671753]: Machine <1> Message<202> Counter <196>
[ WARN] [1458884633.720845046]: Machine <0> Message<165> Counter <163>
[ WARN] [1458884633.721000330]: Machine <0> Message<168> Counter <166>
[ INFO] [1458884633.832237240]: Machine <1> Message<210>
[ WARN] [1458884633.972283715]: Machine <2> Message<289> Counter <285>
[ WARN] [1458884633.972402930]: Machine <2> Message<291> Counter <290>
[ INFO] [1458884634.102028388]: Machine <0> Message<180>
[ WARN] [1458884634.154272541]: Machine <1> Message<217> Counter <214>
[ WARN] [1458884634.154369931]: Machine <1> Message<219> Counter <218>
[ INFO] [1458884634.262470496]: Machine <2> Message<300>
[ INFO] [1458884634.832749255]: Machine <1> Message<240>
[ WARN] [1458884635.340362798]: Machine <0> Message<215> Counter <209>
[ WARN] [1458884635.340468232]: Machine <0> Message<217> Counter <216>
Then, I tried increasing the stack to 10 elements, and the output was improved:
[ INFO] [1458885577.781345375]: Machine <0> Message<150>
[ INFO] [1458885578.197521359]: Machine <1> Message<180>
[ INFO] [1458885578.806767762]: Machine <0> Message<180>
[ INFO] [1458885578.973456886]: Machine <2> Message<240>
[ WARN] [1458885578.973578372]: Machine <2> Message<249> Counter <241>
[ INFO] [1458885579.348755549]: Machine <2> Message<270>
[ INFO] [1458885579.417701869]: Machine <1> Message<210>
[ INFO] [1458885579.781167298]: Machine <0> Message<210>
[ WARN] [1458885580.121854098]: Machine <1> Message<222> Counter <218>
[ WARN] [1458885580.121951202]: Machine <1> Message<228> Counter <223>
[ INFO] [1458885580.390034144]: Machine <1> Message<240>
If I increase the stack then I start experiencing a lag. I think I will have to do a trade between the speed in the transmission and the stack size to something that suits my application. But, I was wondering if there is a way to improve the network communication? Maybe some settings in ROS or my network that I am not taking into account.
EDIT 1
As al_dev suggested, changing to UDP improved the transmission, but now I can't get to work one detail. I am ...

Just an FYI: stack == queue.
@luis-ruiz, are you using TCPROS or UDPROS here?
I am connecting via ssh, so I think I am using TCP. I followed this tutorial