
robot turning in place towards the obstacle using dwa_local_planner [closed]

Hi all,
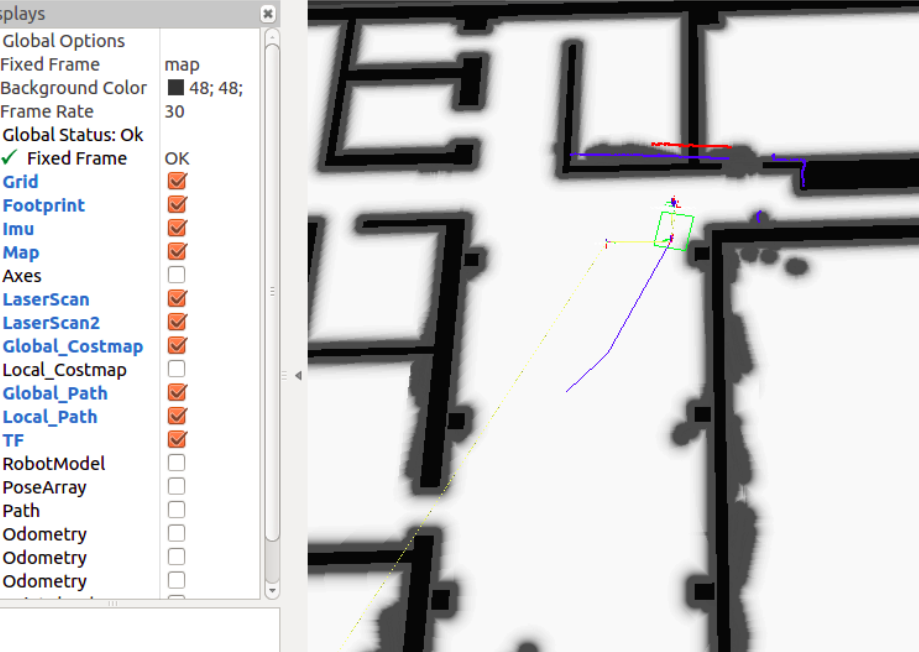
I have a mobile robot with lidar, Kinect, wheel_enoders and IMU which is able to navigate properly using move_base. I am using SBPL_Lattice_Planner as the global planner which works perfectly. I am using dwa_local_planner as the local planner and sometimes, it generates in place velocities towards the obstacle although the global plan is good. I have attached two images below which shows this clearly :
Before Planning:
After Planning:
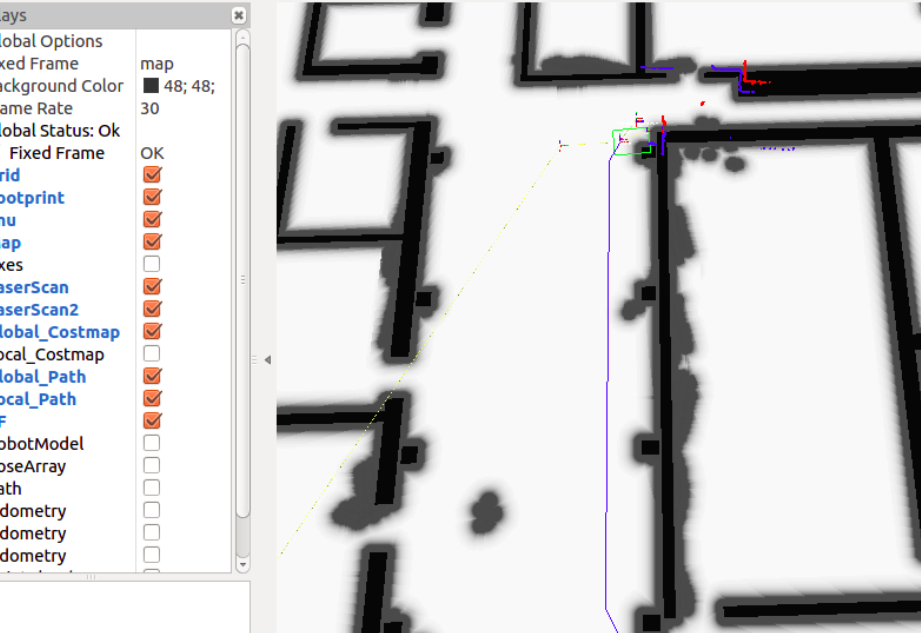
As you can see in the second image, the robot turned clockwise towards the obstacle. It is really weird because the robot had enough space to turn anti-clockwise and go towards the goal instead of going in the wrong direction.
dwa_local_planner_params.yaml
#For full documentation of the parameters in this file, and a list of all the
#parameters available for DWAPlannerROS, please see
#http://www.ros.org/wiki/dwa_local_planner
DWAPlannerROS:
acc_lim_x: 2.5
acc_lim_y: 0
acc_lim_th: 3.0
max_trans_vel: 0.3
min_trans_vel: 0.1
max_vel_x: 0.3
min_vel_x: 0.0
max_vel_y: 0
min_vel_y: 0
max_rot_vel: 0.6
min_rot_vel: 0.4
yaw_goal_tolerance: 0.20
xy_goal_tolerance: 0.20
latch_xy_goal_tolerance: false
sim_time: 1.5
sim_granularity: 0.025
vx_samples: 10
vy_samples: 0
vtheta_samples: 20
controller_frequency: 10
penalize_negative_x: true
path_distance_bias: 1.0
goal_distance_bias: 0.8
occdist_scale: 0.05
forward_point_distance: 0.0
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
oscillation_reset_dist: 0.05
prune_plan: false
sim_period: 0.1
rot_stopped_vel: 0.01
trans_stopped_vel: 0.01
Does anyone have any idea why is this happening? Any suggestions will be appreciated.
Naman

Have you tried to set the min_rot_vel value to a negative one ?
If that works, it would contradict documentation...
I was using this for a project. I have installed the source of BaseLocalPlanner package and modiied them. And I have in a config file the following code :
I don't know if it was the latest version used in the projet and I don't have access to this code anymore.
Interesting contradiction... @Naman, you should definitely give @F.Brosseau a try!