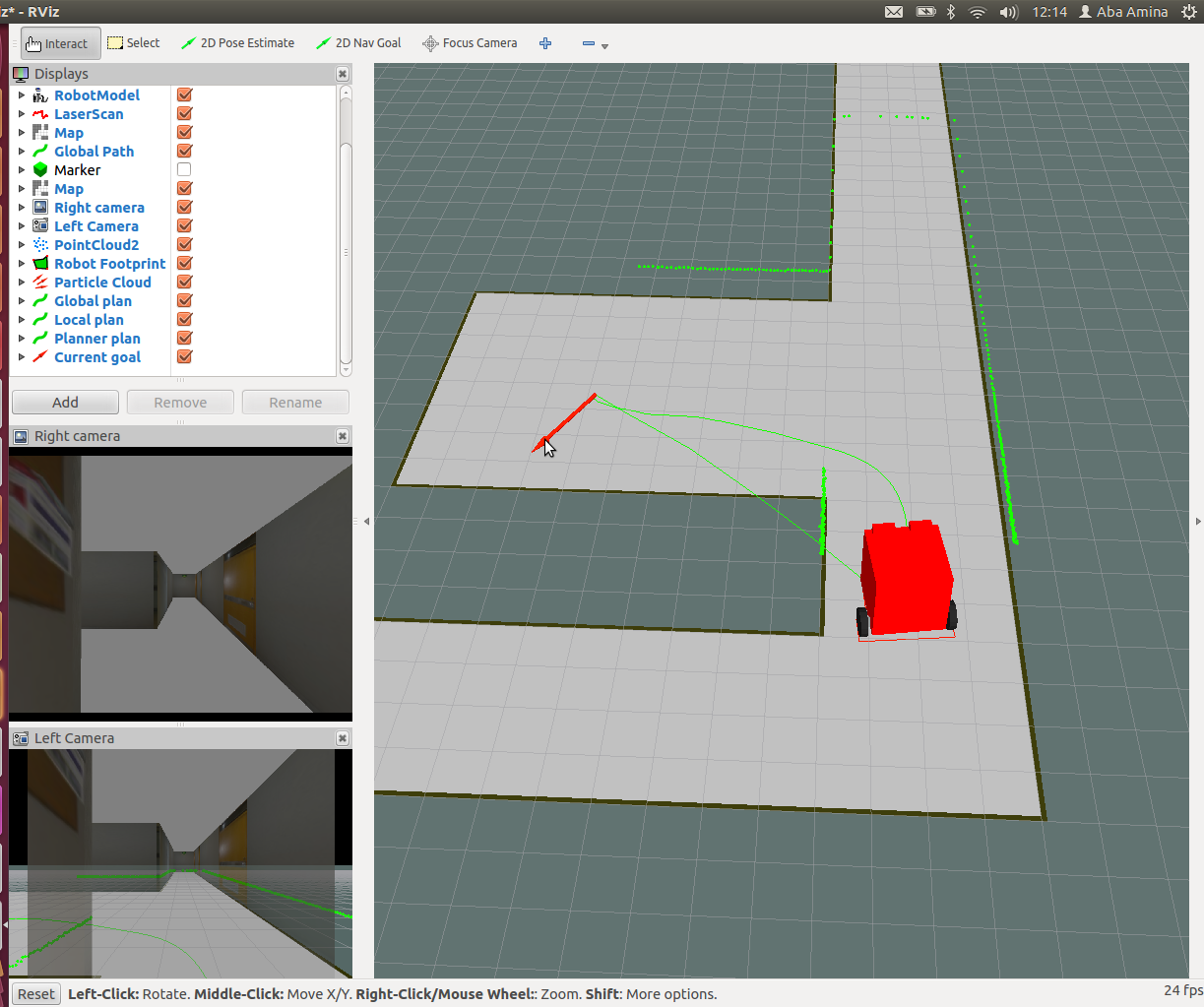
global_plan goes through the wall
Hello,
I'm using navigation stack with following parameters:
(costmap_common_params.yaml)
global_frame: /map
robot_base_frame: base_footprint
update_frequency: 0.5
publish_frequency: 0.5
obstacle_range: 2.5
raytrace_range: 3.0
min_obstacle_height: 0.6
inflation_radius: 1.5
observation_sources: scan
scan: {sensor_frame: laser_scan_link, data_type: LaserScan, topic: stereo/laser_scan, marking: true, clearing: true}
(eband_planner_params.yaml)
EBandPlannerROS:
# TRAJECTORY CONTROL
differential_drive: true
# velocity limits
max_vel_lin: 0.4
max_vel_th: 0.2
min_vel_lin: 0.08
min_in_place_vel_th: 0.05
# goal tolerance
xy_goal_tolerance: 0.2
yaw_goal_tolerance: 0.2
(global_costmap_params.yaml)
global_costmap:
robot_base_frame: base_footprint
update_frequency: 0.5
publish_frequency: 0.5
static_map: true
transform_tolerance: 0.5
footprint_padding: 0.05
(local_costmap_params.yaml)
local_costmap:
global_frame: /map
robot_base_frame: base_footprint
update_frequency: 0.5
publish_frequency: 0.5
static_map: true
rolling_window: true
width: 5.0
height: 5.0
resolution: 0.05
transform_tolerance: 0.5
footprint_padding: 0.0
(move_base_params.yaml)
footprint: [[0.375, 0.375], [0.375, 0.0], [0.4125, 0.0], [0.4125, -0.0375], [0.375, -0.0375], [0.375, -0.375], [-0.075, -0.375], [-0.075, -0.4875], [-0.375, -0.4875], [-0.375, 0.4875], [-0.075, 0.4875], [-0.075, 0.375]]
The controller_frequency is set to 1.0. The problem is that the global plan computed goes through the wall. The plan of NavfnROS is fine. The bad one in the image is the global plan of EBandPlannerROS (robot tries to follow this one). As seen by the below image, Laser scan is well defined. I don't understand why this path is computed. Can anyone help me on this issue please?