
Rviz: Fixed frame [Map] does not exist
Hello,
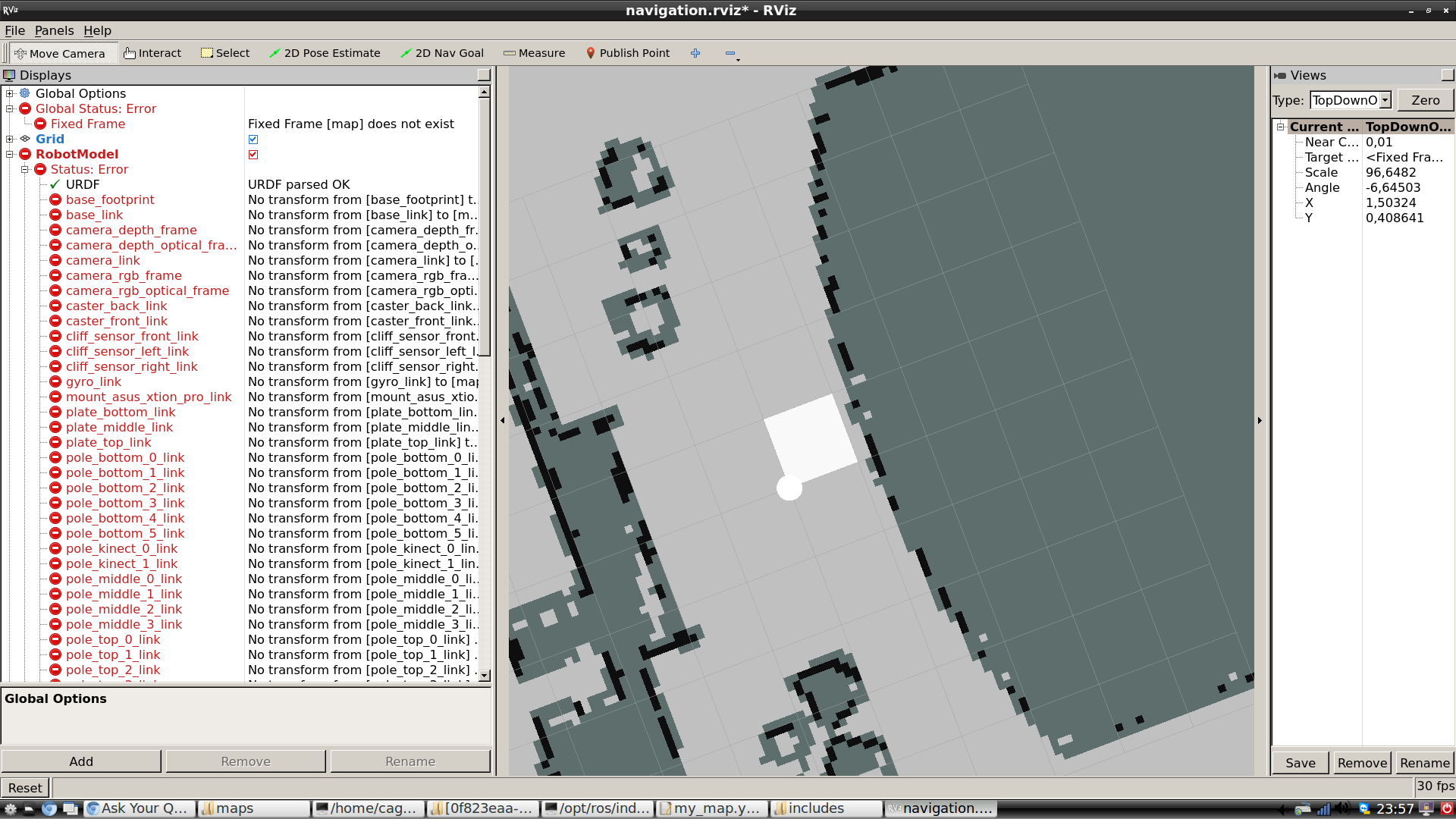
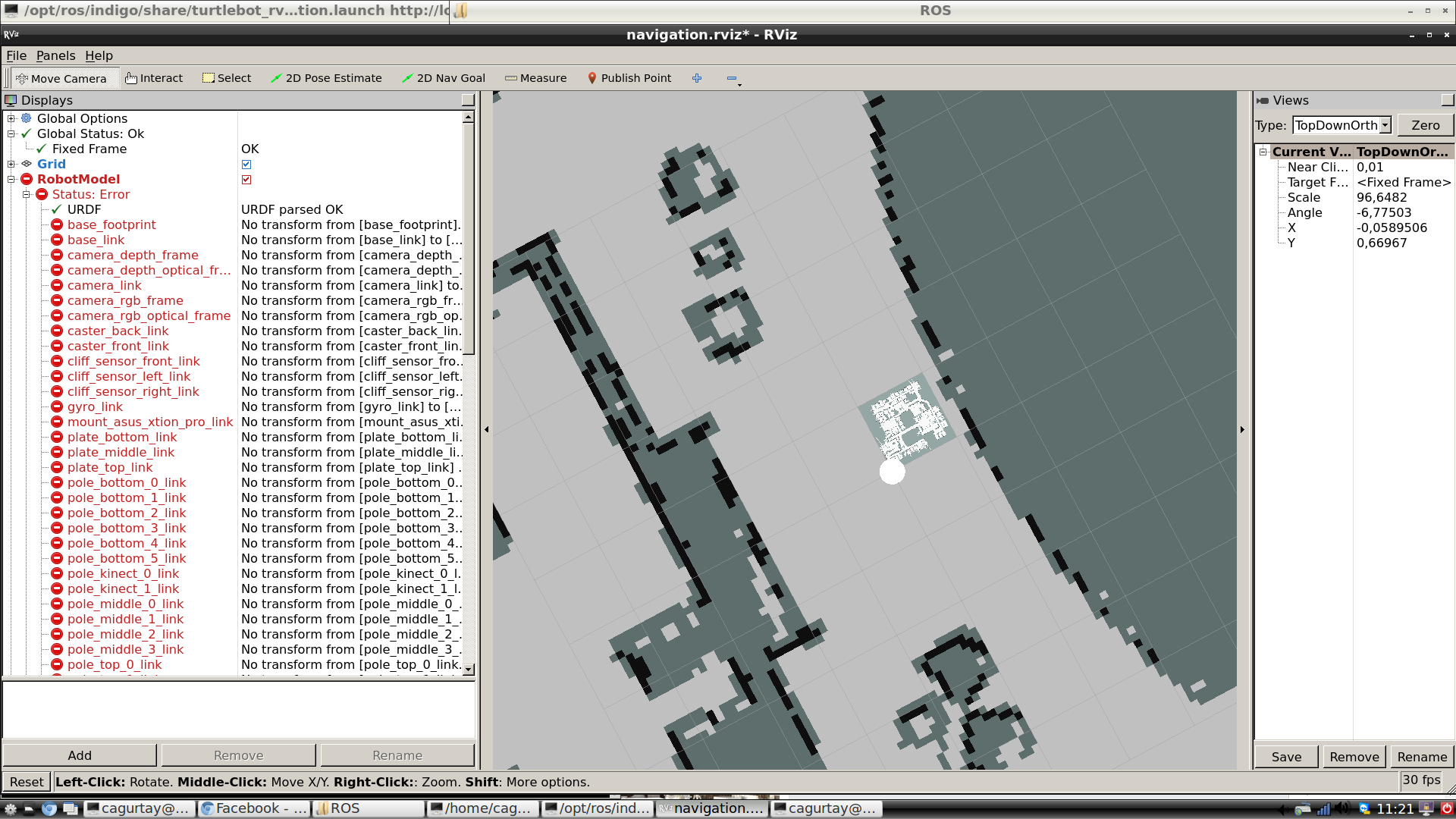
I am trying to do this tutorial Writing A Global Path Planner As Plugin in ROS and i finally managed to get to last step, to simulate on Gazebo. After using roslaunch relaxed_astar test.launch and roslaunch turtlebot_rviz_launchers view_navigation.launch --screen Gazebo opens but I get an error :
Fixed frame [Map] does not exist
Any ideas?
Thank you.
Edit: My map files:
image: my_map.pgm
# a 584 X 526 map @ 0.100 m/cell
resolution: 0.1
origin: [-18, -15, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
My launch file :
<launch>
<include file="/opt/ros/indigo/share/turtlebot_bringup/launch/minimal.launch"></include>
<include file="/opt/ros/indigo/share/turtlebot_bringup/launch/3dsensor.launch">
<arg name="rgb_processing" value="false" />
<arg name="depth_registration" value="false" />
<arg name="depth_processing" value="false" />
<arg name="scan_topic" value="/scan" />
</include>
<!-- Map server -->
<arg name="map_file" default="/home/cagurtay/catkin_ws/src/relaxed_astar/maps/my_map.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<arg name="initial_pose_x" default="0.0"/>
<arg name="initial_pose_y" default="0.0"/>
<arg name="initial_pose_a" default="0.0"/>
<include file="/opt/ros/indigo/share/turtlebot_navigation/launch/includes/amcl.launch.xml">
<arg name="initial_pose_x" value="$(arg initial_pose_x)"/>
<arg name="initial_pose_y" value="$(arg initial_pose_y)"/>
<arg name="initial_pose_a" value="$(arg initial_pose_a)"/>
</include>
<!-- Move base -->
<include file="/opt/ros/indigo/share/turtlebot_navigation/launch/includes/move_base.launch.xml"/>
</launch>
add a comment



{kind=link}