Odometry error in translation [closed]
Dear all,
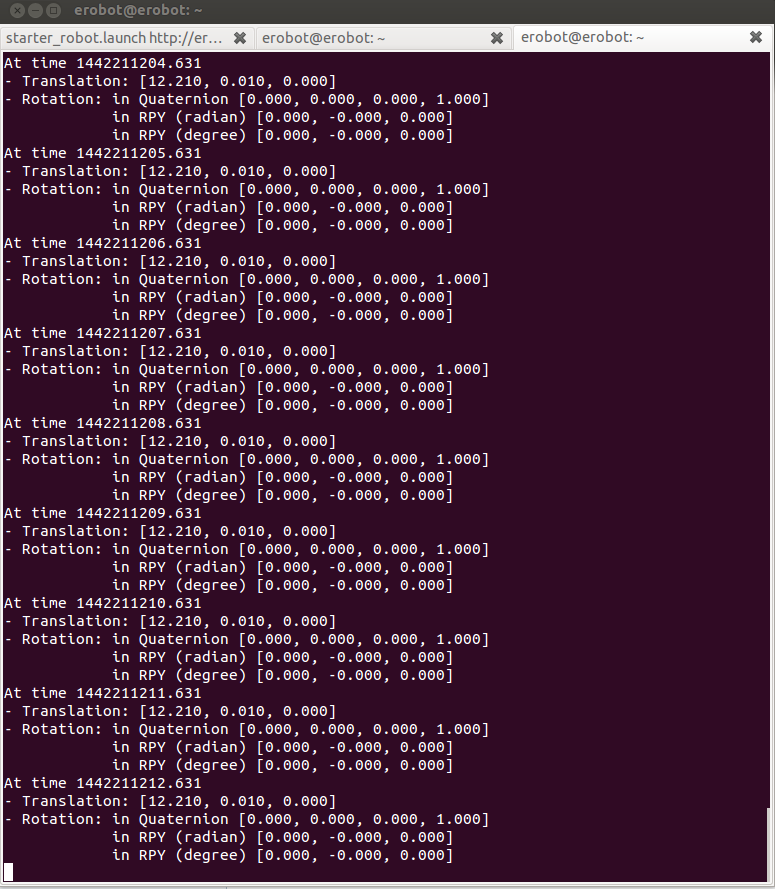
I am currently using my holonomic robot and laser sensor to build a map with slam_gmapping. Howerver the map quality is poor. Then I found out something wrong with odometry by following this tuning tutorial to test odometry.
When I performed rotation, setting decay time of laser scan is 20, then scan data showed good result. However, when I put robot 90 cm away of wall, then moves robot toward to the wall, the scan data looked strange like this.
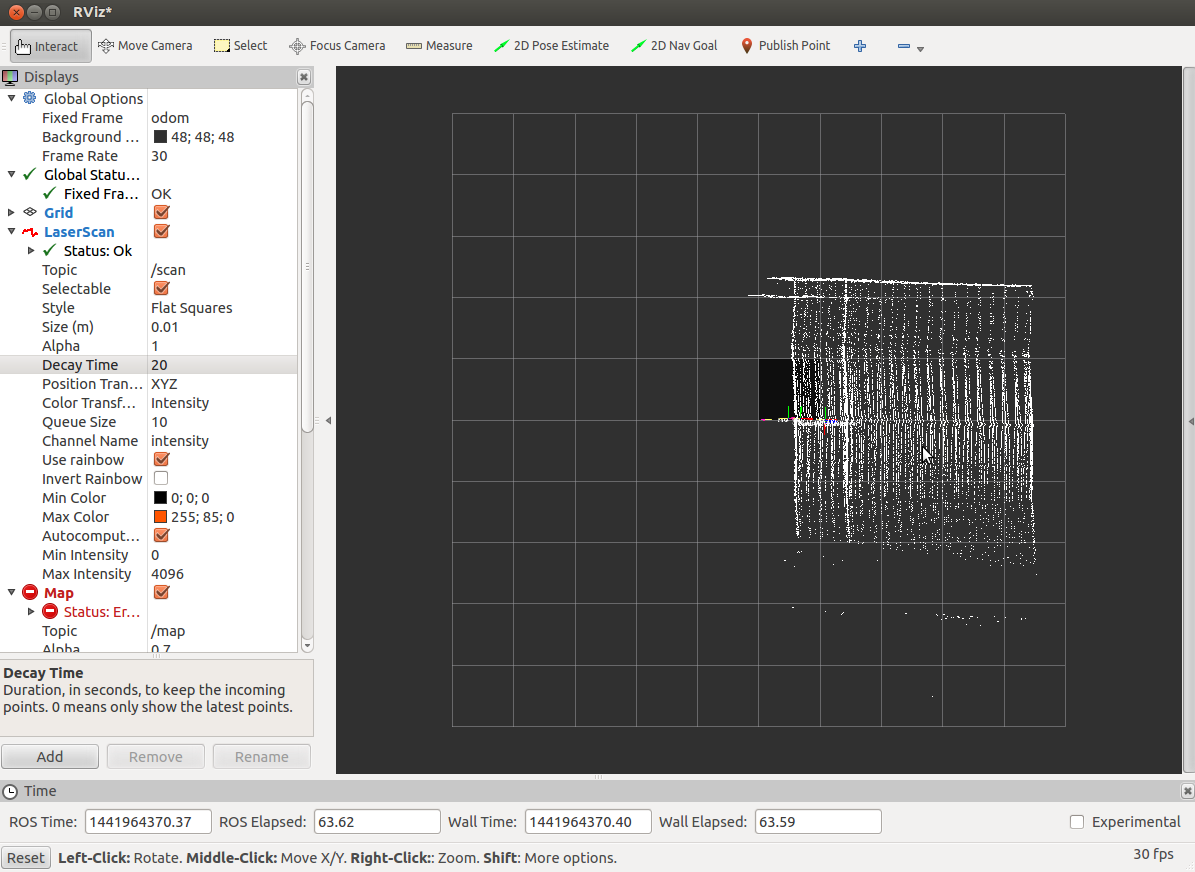
So what could be problem with my odometry and any solution ?
Thank you all!
Closed for the following reason
the question is answered, right answer was accepted by
WB
close date 2015-09-17 03:27:15.104959
add a comment