
Octomap for Dynamic Mobile Obstacles
Hi there, I am using ROS Hydro, Rviz and Gazebo 1.9 for simulating 2 Husky A200 in a highway scene. My aim is to simulate autonomous driving husky such that one Husky can use Octomap or some Occupancy Grid Mapping Techniques to avoid another mobile husky. Can Octomap handle dynamically changing mobile obstacles for safe navigation / obstacle avoidance ?
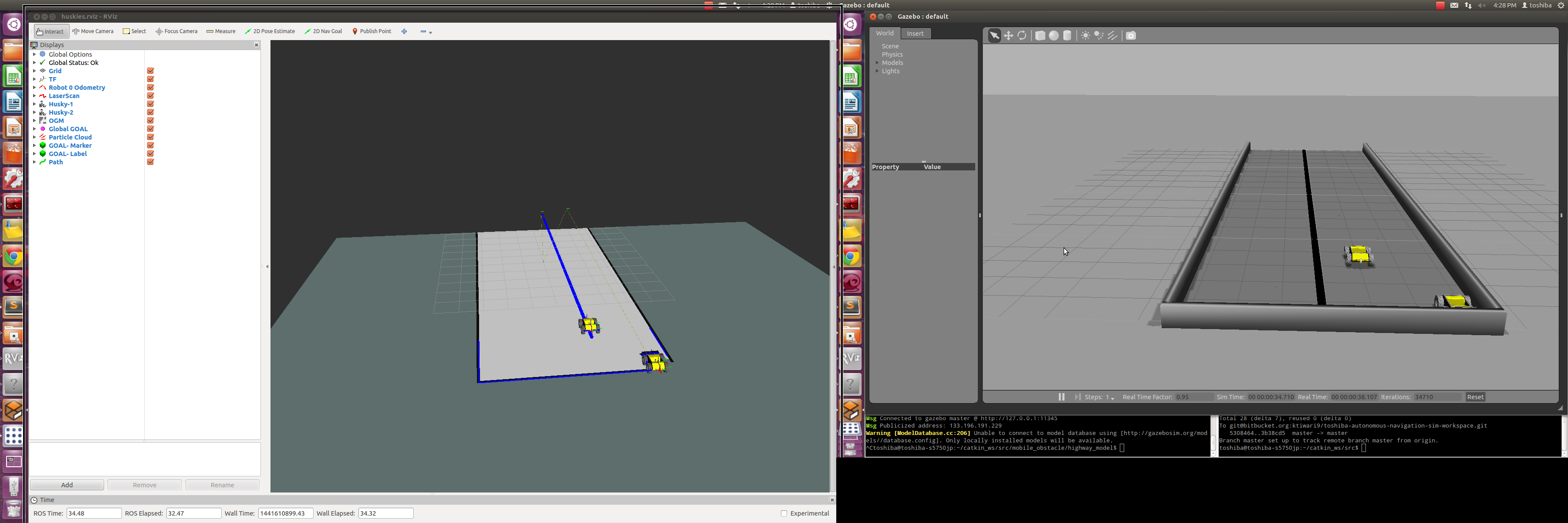
My simulation setup is shown below
add a comment
