
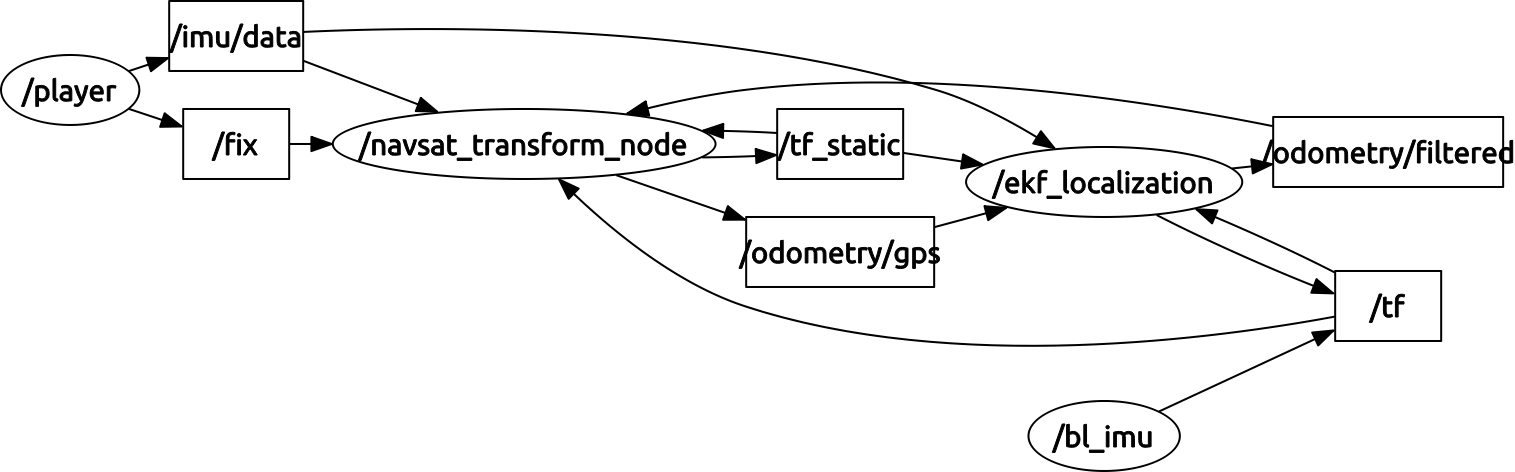
navsat robot_localization
In Navasat_transform_node have a question about when the node receives a position becomes GPS latitude and longitude, UTM this format is x, and an identifier of area and band, for example Spain 29T, 30T and 31T, what happens when we change area or band ? X and Y incrise continue or start again?
Edit1:
I have other problem, i download the last version for indigo and the ekf not publish the tf between base_link and odom like the other versions. Whats happen?
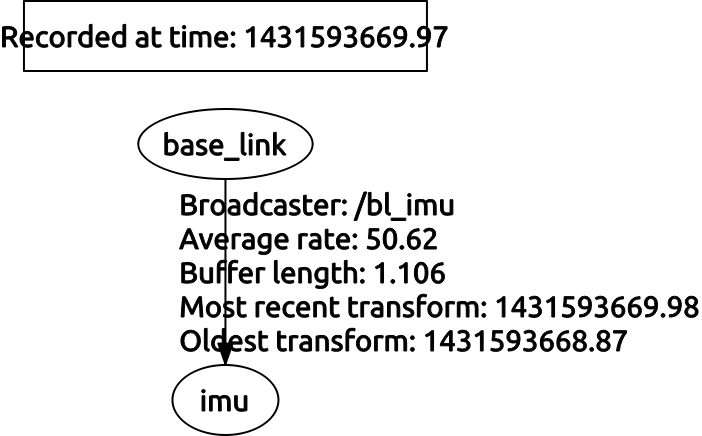
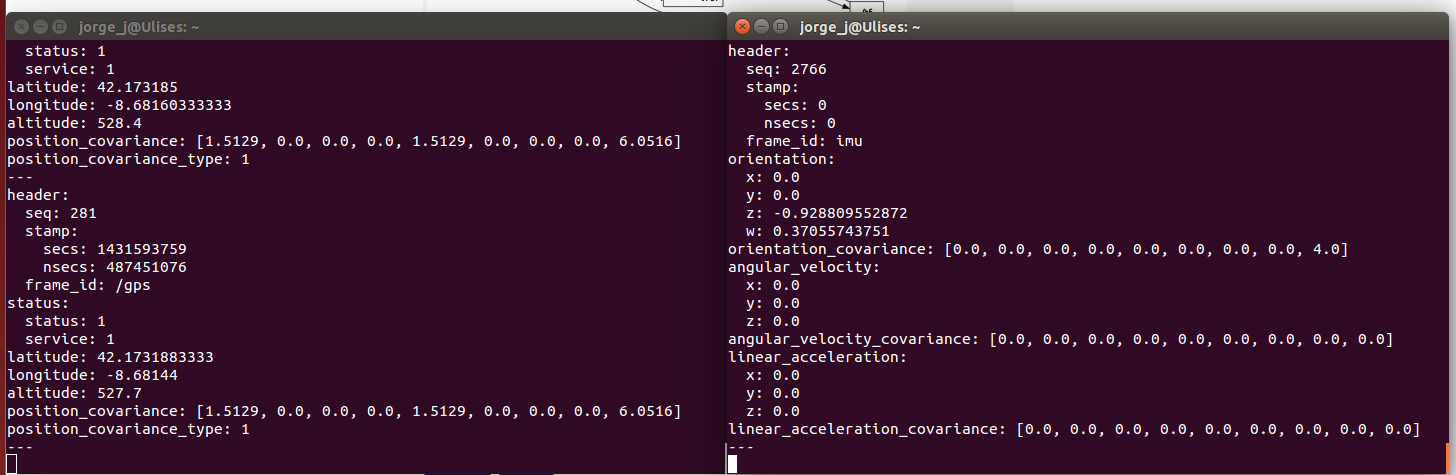


Your IMU message appears to have 0 time stamps. That won't work. Fix that, and if your issue isn't resolved, please post a new question.