Are you sure you correctly configured the IP address for the staubli node to connect to (in controller.h)?
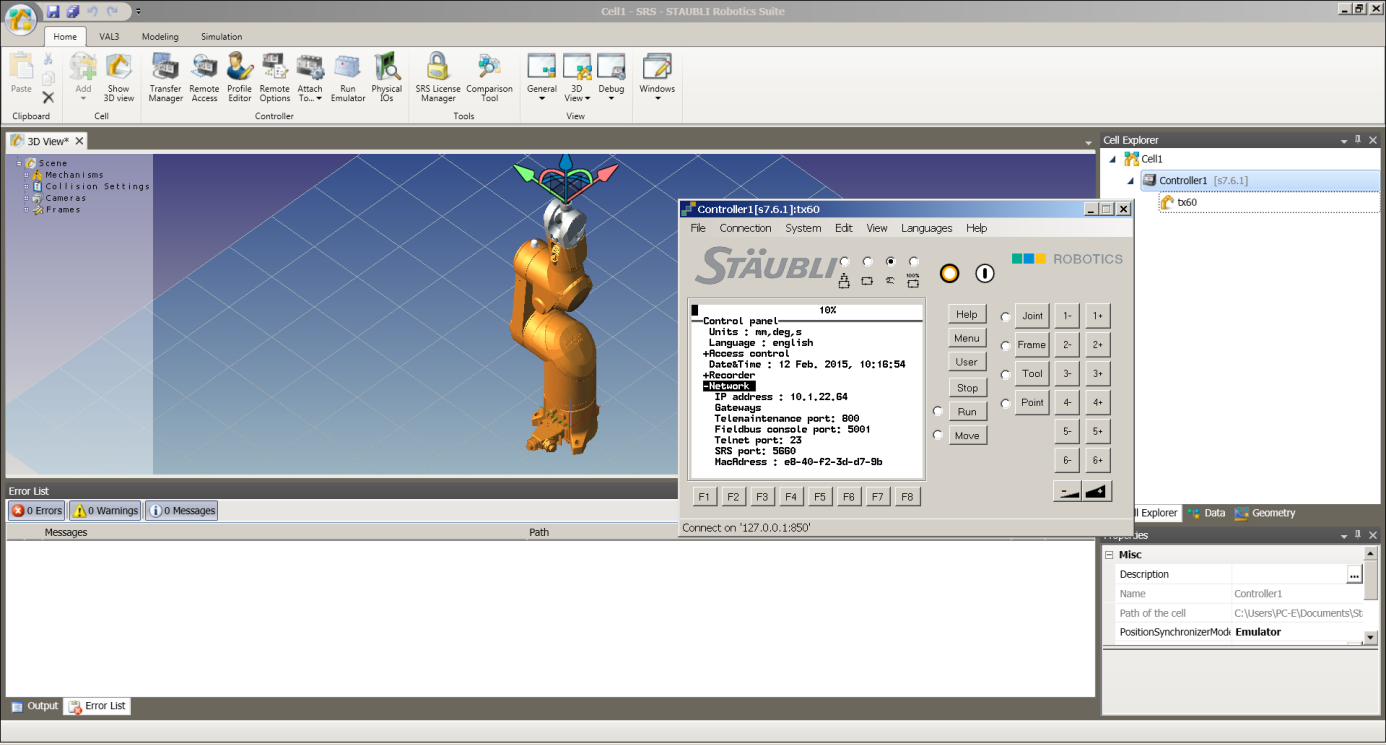
According to your screenshot, the node is trying to connect to 10.1.22.254, but your CS8 emulator shows its using 10.1.22.64? I'm not 100% sure the simulator reports the IP of the pc it's running on, but in any case you should check that the ROS node is using the correct address.
Edit: check firewall settings on the Windows machine. It might be that the emulator is only allowed to accept traffic on private or public networks. Disabling it would give a quick way to test this (but please do return it to a working state afterwards).
Edit2:
Looking at the source in the archive you linked, two things stand out:
ROS_INFO("* * * * * * * * * * * * * * * * * * * * * * * * *");
ROS_INFO("* MAKE SURE CS8 CONTROLLER IS IN NETWORKED MODE *");
ROS_INFO("* * * * * * * * * * * * * * * * * * * * * * * * *");
And:
if(staubli.Login( url, "default", ""))
{
ROS_INFO("Connected to Staubli CS8 Controller.");
}
else
{
ROS_ERROR("Failed to connect to Staubli CS8 Controller.");
}
So:
- Is the controller in Networked Mode
- I'm guessing the
Login(..) method uses some sort of username/password combination. Has that info been changed on the controller perhaps? Is the password for default still "" (an empty string)?

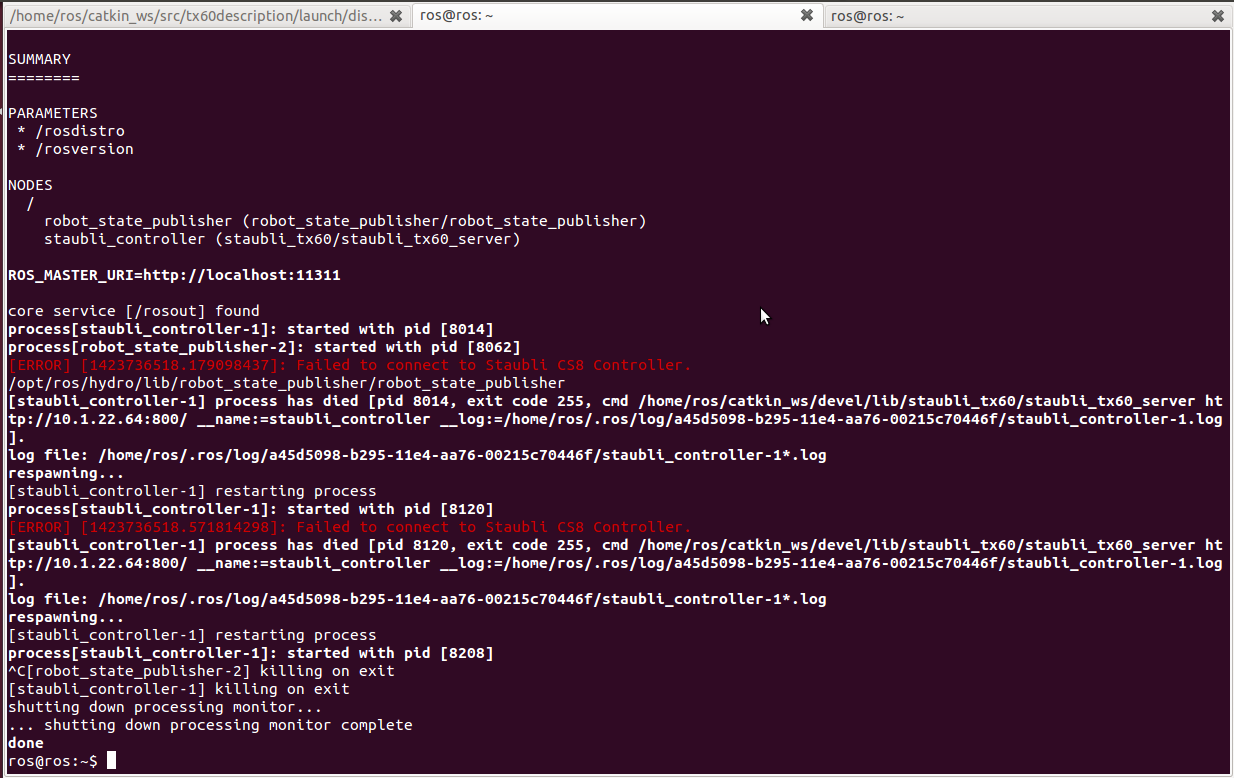

There is probably more output on the console than just this single error? Could you update your post with some more context as well?
@gvdhoorn I just edit my question and add more information