Suscribing rviz to viso2's /stereo_odometer topics

Hello, I am currently trying to use the viso2_ros stereo_node in ROS Hydro. I am using the following launch file:
<launch>
<!-- Arguments -->
<arg name="camera" default="/stereo" /> <!-- The namespace where images are published -->
<!-- Run the camera -->
<group ns="stereo" >
<node pkg="uvc_camera" type="uvc_stereo_node" name="uvc_stereo_node">
</node>
</group>
<!-- Run the ROS package stereo_image_proc -->
<group ns="$(arg camera)" >
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc">
</node>
</group>
<!-- Run the viso2_ros package -->
<node pkg="viso2_ros" type="stereo_odometer" name="stereo_odometer" output="screen">
<remap from="stereo" to="$(arg camera)"/>
<remap from="image" to="image_rect"/>
</node>
</launch>
And this are the topics published by viso2 as a result:
/stereo_odometer/info
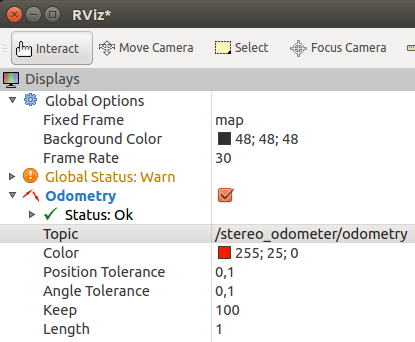
/stereo_odometer/odometry
/stereo_odometer/point_cloud
/stereo_odometer/pose
I am getting a constant Visual Odometer got lost! message, so I would like to subscribe rviz to the odometry and point cloud topics to try an troubleshoot the issue.
I think I should be able to do this by opening an odometry and a point cloud display, but from what I read they subscribe to nav_msgs/Odometry and sensor_msgs/PointCloud respectively. I tried remapping the output of the viso2 so it would publish to nav_msgs and sensor_msgs instead of stereo_odometer, but it didn't work, so now i am trying to get rviz to subscribe to the stereo_odometer instead.
I tried adding the following lines to the launch file but it had no effect (rviz still does not show a thing when I open the above mentioned displays):
<node pkg="rviz" type="rviz" name="rviz">
<remap from="nav_msgs" to="stereo_odometer"/>
<remap from="sensor_msgs" to="stereo_odometer"/>
</node>
Thank you in advance for any help or ideas about how to do this (or how to properly remap viso2 output topic).