
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Athria,
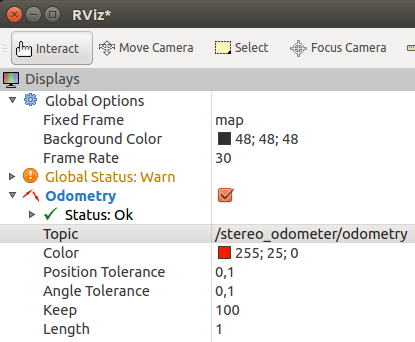
you are mixing up topics with message types. For example, /stereo_odometer/point_cloud is the topic where sensor_msgs/PointCloud2 is the message type. There is no need for any remapping to display the odometry or point cloud in rviz. Simply edit the topic name in the rviz display to match the one that is published:
 Also note that the stereo odometer publishes
Also note that the stereo odometer publishes sensor_msgs/PointCloud2 (with the 2 at the end), make sure you use the corresponding display in rviz.
You should also consider adding a display for TF as it gives nicer real-time feedback than the odometry display.
| | 2 | No.2 Revision |
Athria,Athira,
you are mixing up topics with message types. For example, /stereo_odometer/point_cloud is the topic where sensor_msgs/PointCloud2 is the message type. There is no need for any remapping to display the odometry or point cloud in rviz. Simply edit the topic name in the rviz display to match the one that is published:
Also note that the stereo odometer publishes sensor_msgs/PointCloud2 (with the 2 at the end), make sure you use the corresponding display in rviz.
You should also consider adding a display for TF as it gives nicer real-time feedback than the odometry display.
| | 3 | No.3 Revision |
Athira,Athria,
you are mixing up topics with message types. For example, /stereo_odometer/point_cloud is the topic where sensor_msgs/PointCloud2 is the message type. There is no need for any remapping to display the odometry or point cloud in rviz. Simply edit the topic name in the rviz display to match the one that is published:
Also note that the stereo odometer publishes sensor_msgs/PointCloud2 (with the 2 at the end), make sure you use the corresponding display in rviz.
You should also consider adding a display for TF as it gives nicer real-time feedback than the odometry display.
| | 4 | No.4 Revision |
Athria,
you are mixing up topics with message types. For example, /stereo_odometer/point_cloud is the topic where sensor_msgs/PointCloud2 is the message type. There is no need for any remapping to display the odometry or point cloud in rviz. Simply edit the topic name in the rviz display to match the one that is published:
published:
sensor_msgs/PointCloud2 (with the 2 at the end), make sure you use the corresponding display in rviz.
You should also consider adding a display for TF as it gives nicer real-time feedback than the odometry display.  ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
