
Rviz: fixed frame [world] does not exist

Hi everybody, i'm working on Rviz, after opening it:
roscore
rosrun rviz rviz
and open a configuration:
rviz_config.rviz
that the instuction of SVO gives me
it give me an errore on the fixed frame:
No tf data. Actual error: Fixed Frame [world] does not exist
and i cannot display nothing on my grid and cannot change my markers that doesn't work on image... i'm new on rviz, did someone know how solve the problem?? cause yesterday was working well.... for more precision, i'm working on the svo instruction, with the video from the bag.
thanks


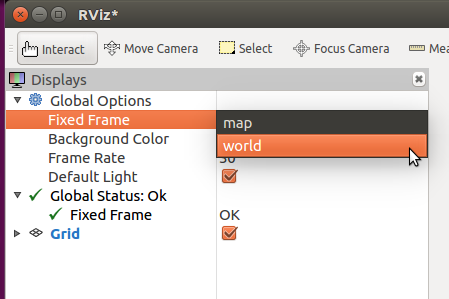

now it give me error when i load the default configuration too... it gives me an error frame that say "the map doesn't exist" and i don't know how to solve...