
Problem Visualising LaserScan in rviz?
Hi all,
Hoping someone can explain what what's missing here. I have 3 nodes: Openni2_camera, depthminage_to_laserscan and my own node which publishes all the tf transforms, sonar, odemetry, telemetry and ir data.
When I come to get rviz to publish the laserscan message i get this:
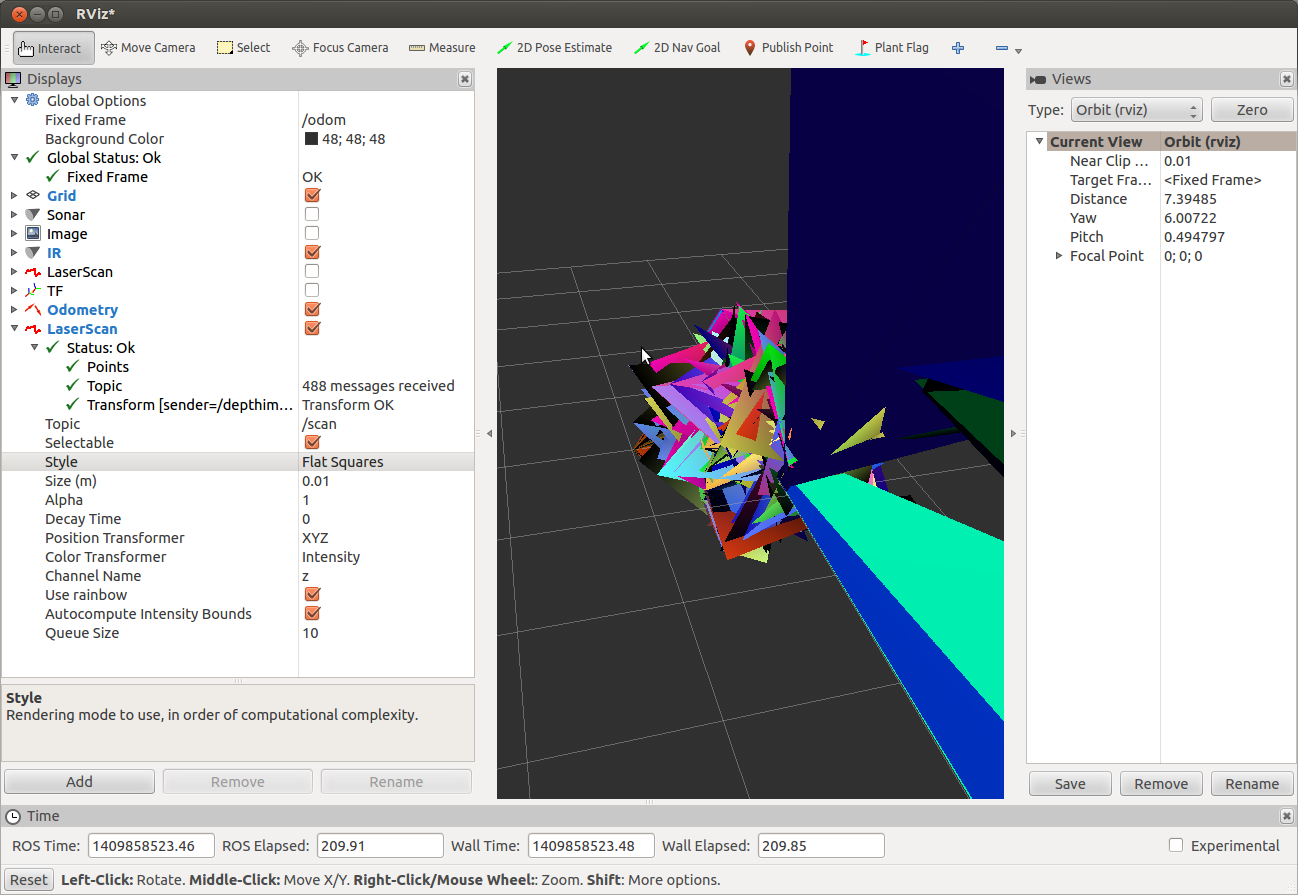
rviz seems to be happy that the transform is correct
my topic graph looks like
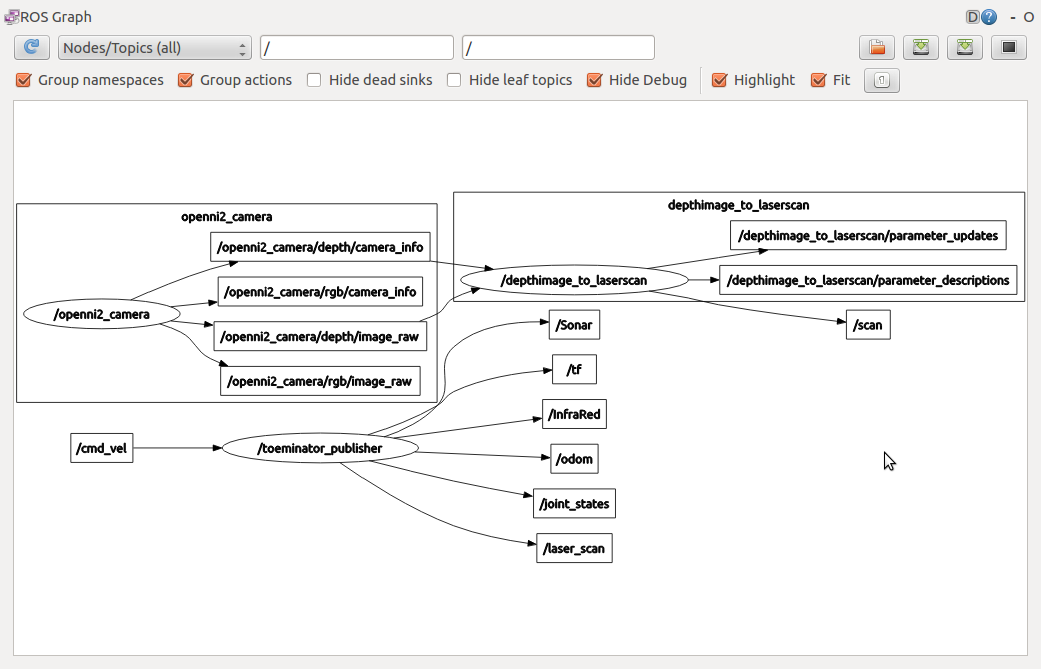
and lastly the bit of code that does the transform for the
bool ToeminatorROSBridge::publishLaserScanTF(ros::Time time, RobotData* pRobotData)
{
// Scan Range
sensor_msgs::Range sonar;
tf::TransformBroadcaster sonar_broadcaster;
ros::NodeHandle n;
sonar_broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::createQuaternionFromRPY(0, 0, degree_to_radian(ROS_FrontSonarAngle)),
tf::Vector3(0.0, 0.15, 0.0)),
time,
"base_link",
"camera_depth_frame"));
return true;
}
Anyone any idea where the problem lies? - I suspect it's transform relate, not sure where however. All the other data (Sonars etc are showing up as expected)
EDIT:
So running:
rosrun tf static_transform_publisher 1 0 0 0 0 0 /base_link /camera_depth_frame 10
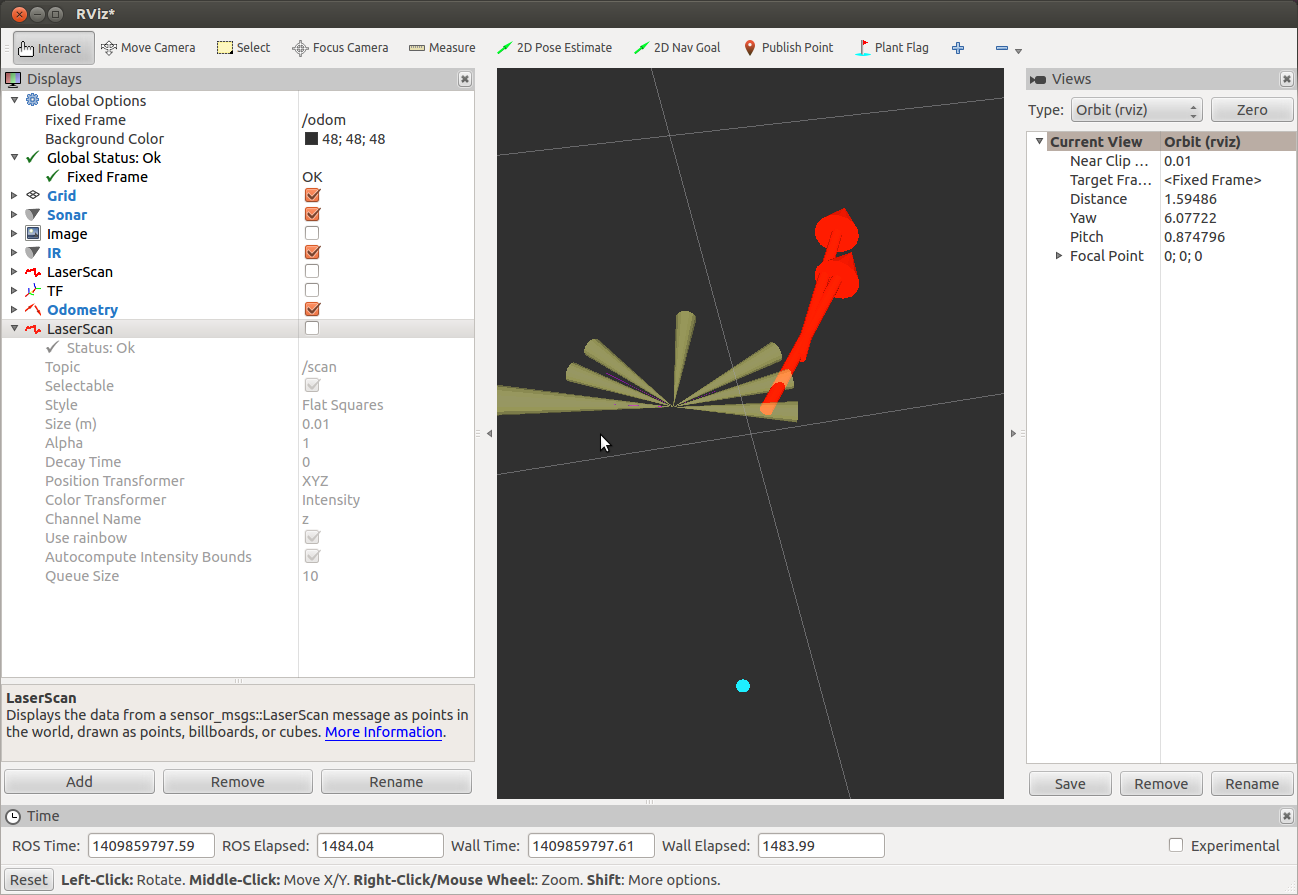
yields this as a 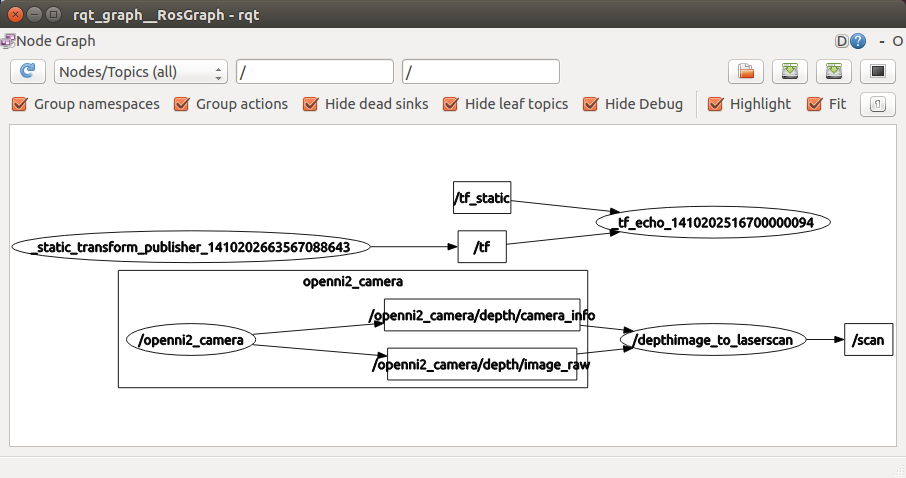
Both nothing in rviz or run
rosrun tf view_frames
Many Thanks
Mark

that's very strange. Does it display normally if you publish a static transform instead of using your transform broadcaster?
Good idea - I've not tried a static transform yet - will try that this evening and report.
try changing fixed frame in global options to some other frame.