
Problems with static tf publisher
I am using my own URDF file for my custom built robot, the robot is properly visible and moves properly in rviz, If I run the simulation with /odom publisher.
But when open the camera nodlet with openni_launch and publish a static tf, then the laser scanner in the simulation starts to rotate randomly, I don't have idea why this is happening.
I publish the static tf in launch file which contains:
<launch>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.1 0 0.455 0 0 0 base_link camera_link 100"/>
</launch>
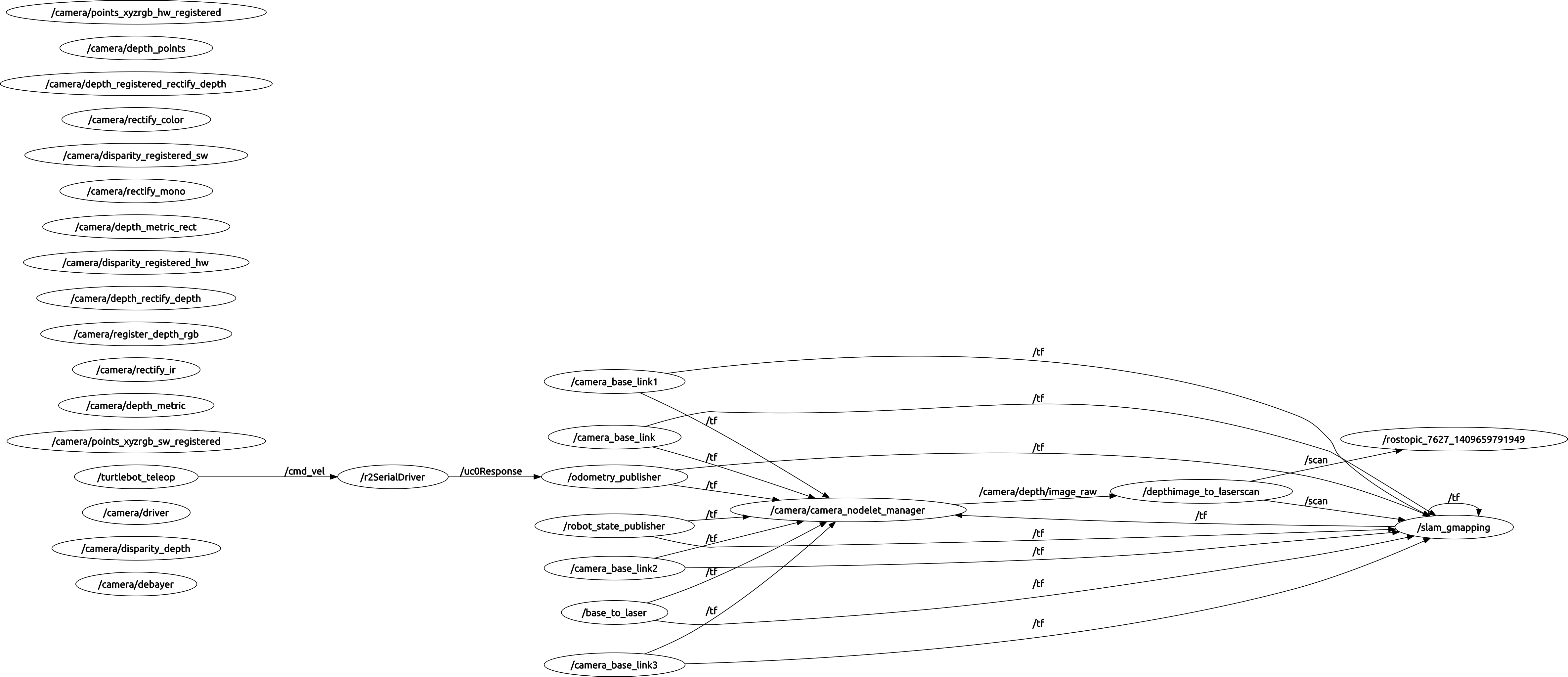
Below are my rqt_graph
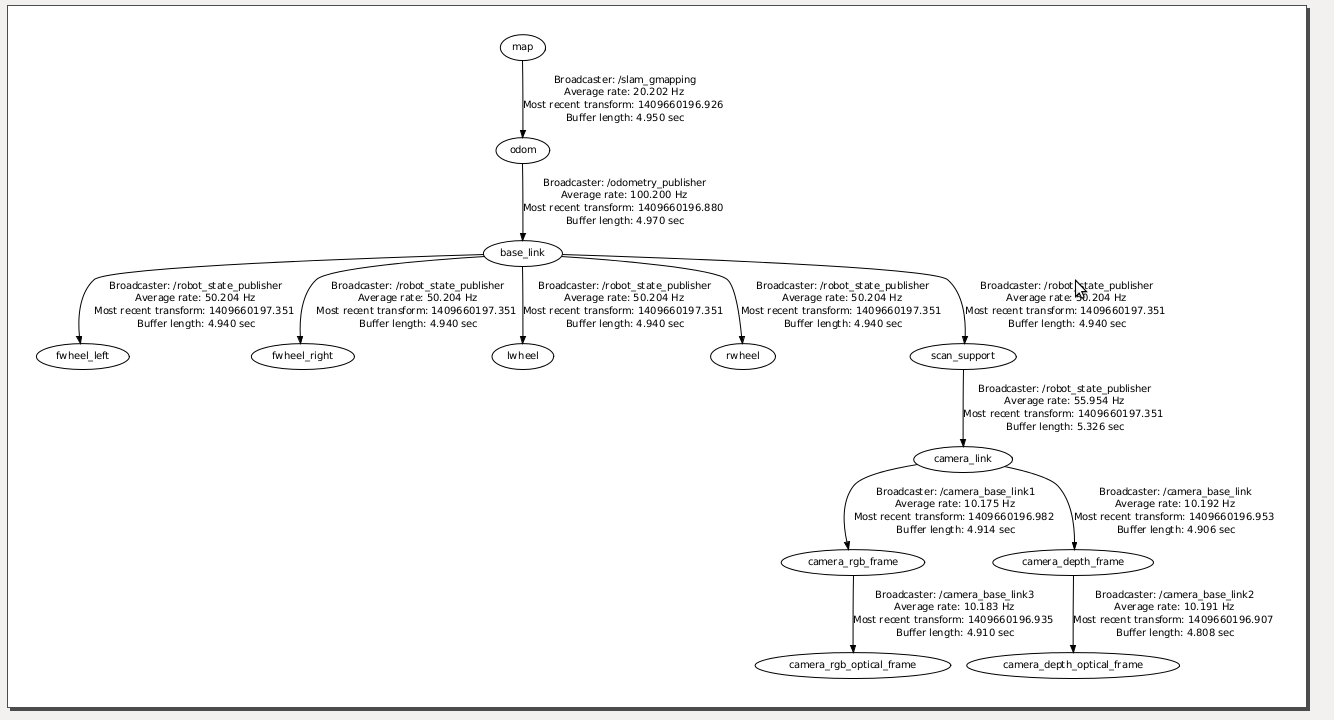
Please find the below frames.pdf
and the slam_gmapping node gives the following warnings
[ INFO] [1409662993.035030893]: Laser is mounted upwards.
-maxUrange 9.99 -maxUrange 9.99 -sigma 0.05 -kernelSize 1 -lstep 0.05 -lobsGain 3 -astep 0.05
-srr 0.1 -srt 0.2 -str 0.1 -stt 0.2
-linearUpdate 1 -angularUpdate 0.5 -resampleThreshold 0.5
-xmin -100 -xmax 100 -ymin -100 -ymax 100 -delta 0.05 -particles 30
[ INFO] [1409662993.055169092]: Initialization complete
update frame 0
update ld=0 ad=0
Laser Pose= 0.257682 -1.50465 1.55431e-15
m_count 0
Registering First Scan
update frame 6
update ld=0.0282843 ad=1.5708
Laser Pose= 0.237682 -1.48465 -1.5708
m_count 1
Scan Matching Failed, using odometry. Likelihood=-0.0229554
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4160.76
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1.48465 -1.5708
Scan Matching Failed, using odometry. Likelihood=-4266.67
lp:0.257682 -1.50465 1.55431e-15
op:0.237682 -1 ...add a comment
