
[Groovy] How to link /scan to base_link?

When I launch my move_base.launch, ( http://wiki.ros.org/navigation/Tutori... ) , I got this error :
Waiting on transform from /base_link to /map to become available before running costmap, tf error:
[ WARN] [1406541885.908819812]: No laser scan received (and thus no pose updates have been published) for 1406541885.908702 seconds. Verify that data is being published on the /scan topic.
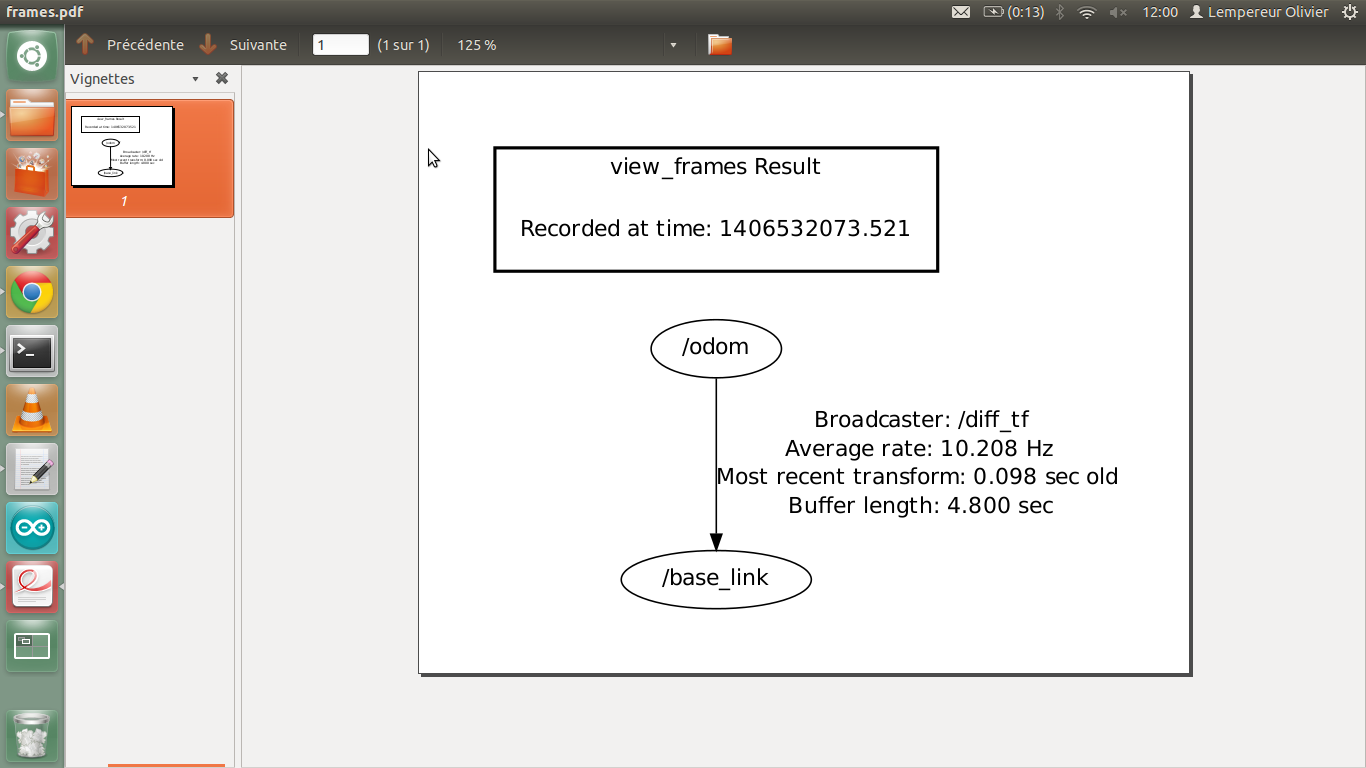
This is my frames.pdf file
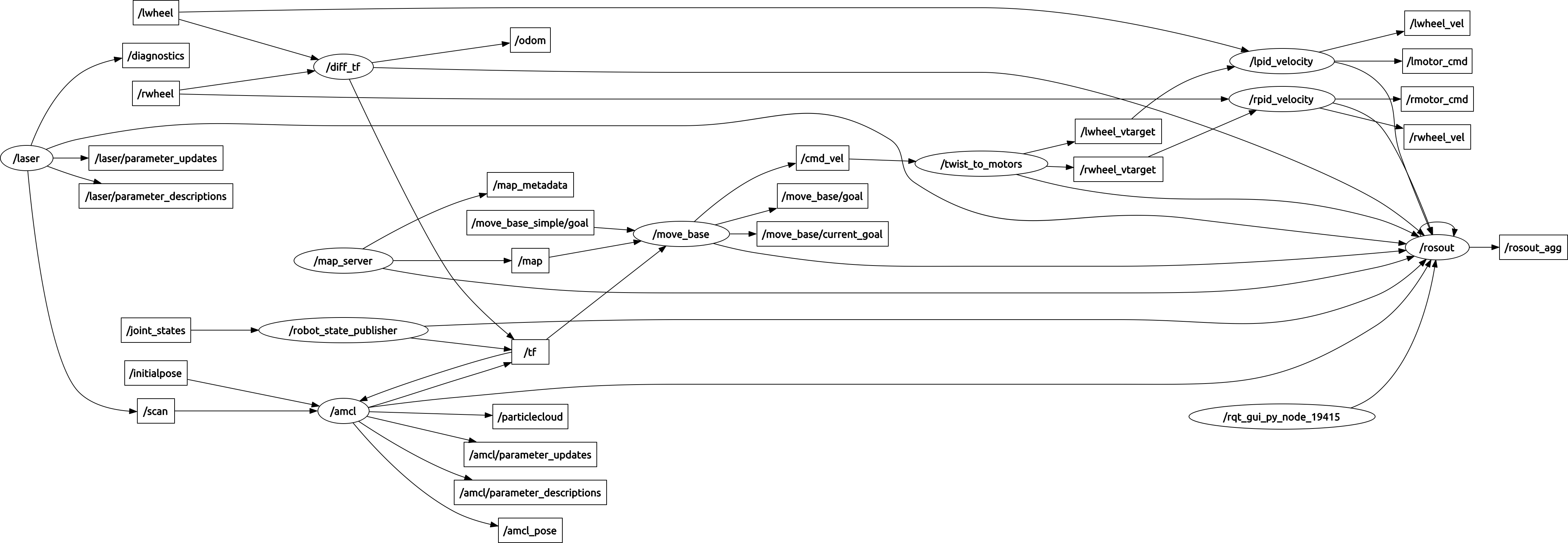
This is the rqt_graph :


did you run roslaunch my_robot_configuration.launch first ?
yes I did.
check if tf is available using $ rosrun tf view_frames $ evince frames.pdf
I've posted the result
check laser is published on /scan topic. otherwise remap your laser topic to /scan. please upload picture of rqt_graph .
When I make rostopic echo /scan I see that somethink is published
you can see that /odom is not subscribe by none. No idea about it.
No, I don't know how to link /odom to base_link