Openni2 problem with registered depth points
Hi,
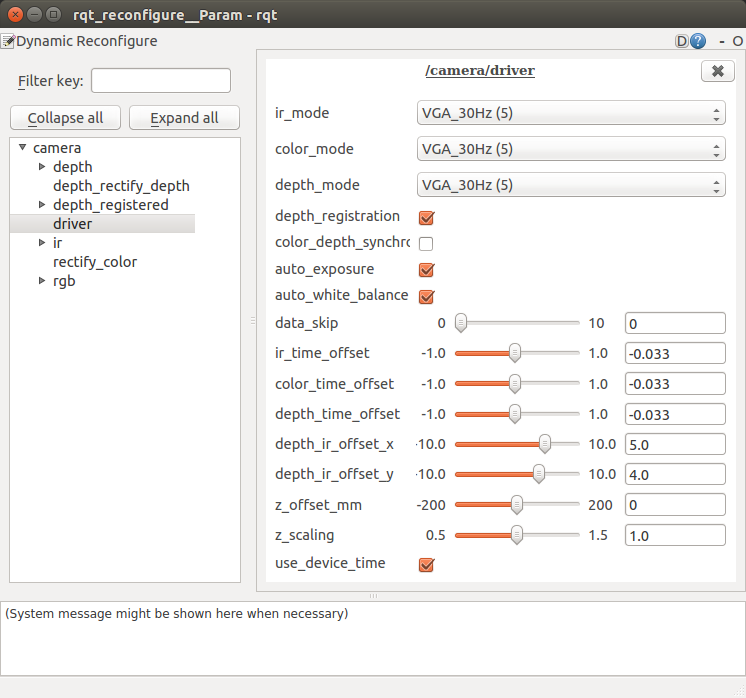
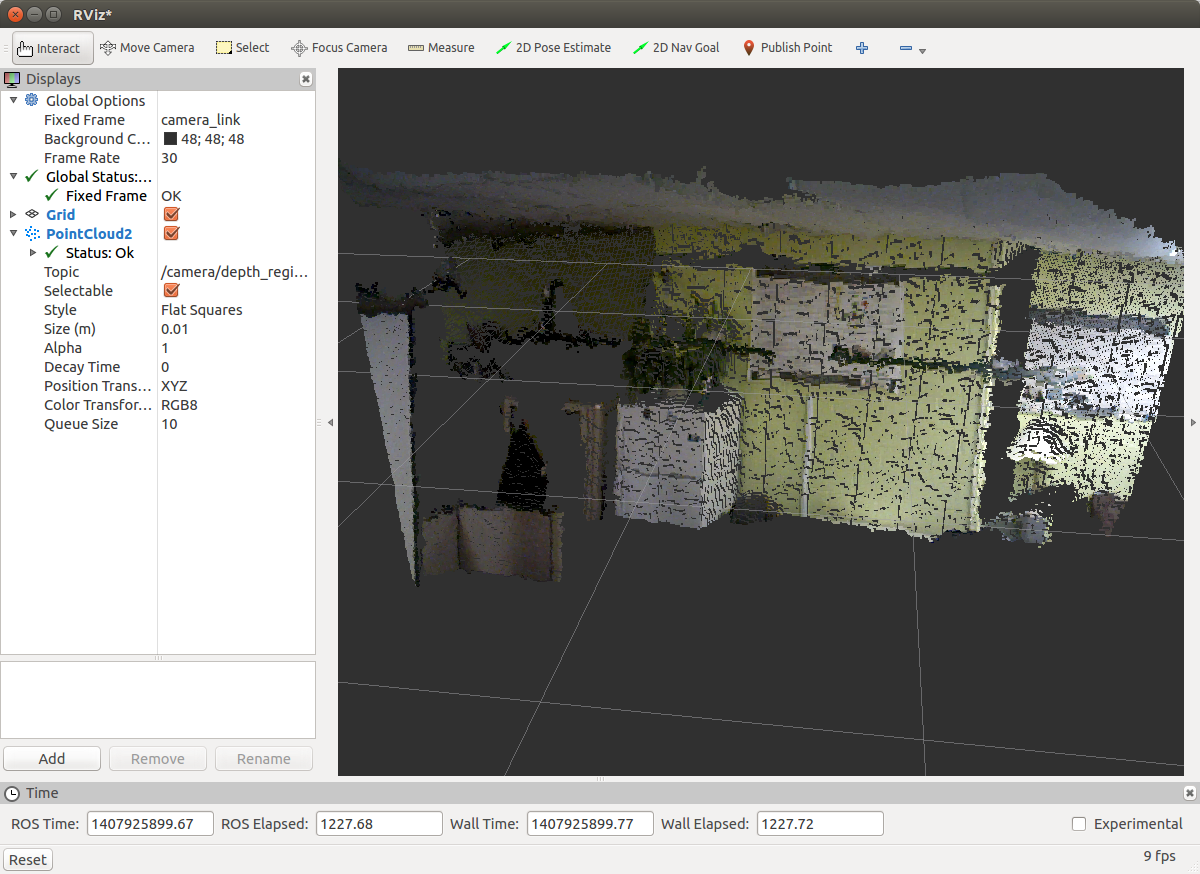
I have an Xtion depth camera attached to nao robot, and I try to get registered depth points from it but the topic almost publishes nothing (except one or two messages after long time), also I receive the following warnings:
Image messages received: 5
CameraInfo messages received: 22
Synchronized pairs: 0
Image messages received: 4
CameraInfo messages received: 22
Synchronized pairs: 0
Note: I run openni2 on the robot just to load the driver and to publish tf, and I run other openni2 on remote PC to do the processing.
Note: I have tried to subscribe to raw rgb image (rostopic hz /topic_name ) and it works correctly alone, and to subscribe to depth raw image and also it works correctly alone, but when I subscribe to both of them in parallel only one of the works.
Can anyone help me, I am new to ros and openni2 and these stuff.
add a comment