
No laser scan received
I'm trying to use amcl to localize my robot using a bag file. Steps I do are these:
1) Publishing the map: rosrun map_server map_server map.yaml
2) Running amcl: rosrun amcl amcl scan:=base_scan _odom_frame:=odom_combided
3) Playing the bag file: rosbag play small.bag
Published topics are:
/amcl/parameter_descriptions
/amcl/parameter_updates
/amcl_pose
/base_odometry/odom
/base_odometry/odometer
/base_odometry/state
/base_scan
/clock
/initialpose
/map
/map_metadata
/move_base_simple/goal
/particlecloud
/robot_pose_ekf/odom_combined
/rosout
/rosout_agg
/tf
/tilt_scan
/torso_lift_imu/data
/torso_lift_imu/is_calibrated
But amcl node prints out this message continuously: [ WARN] [1391522838.082207618]: No laser scan received (and thus no pose updates have been published) for 1391522838.082082 seconds. Verify that data is being published on the /base_scan topic.
And /amcl_pose publishes nothing.
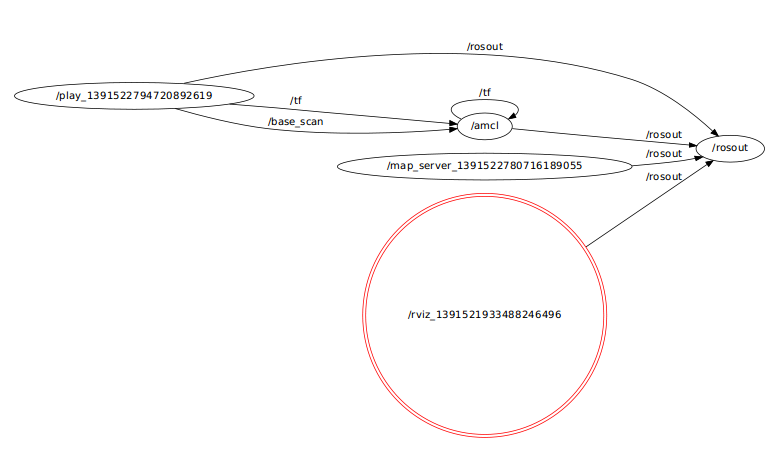
rxgraph output:



can you post your tf tree?
It's not just a typo `odom_combided` != `odom_combined`?