
Simulated kinect

Hello,
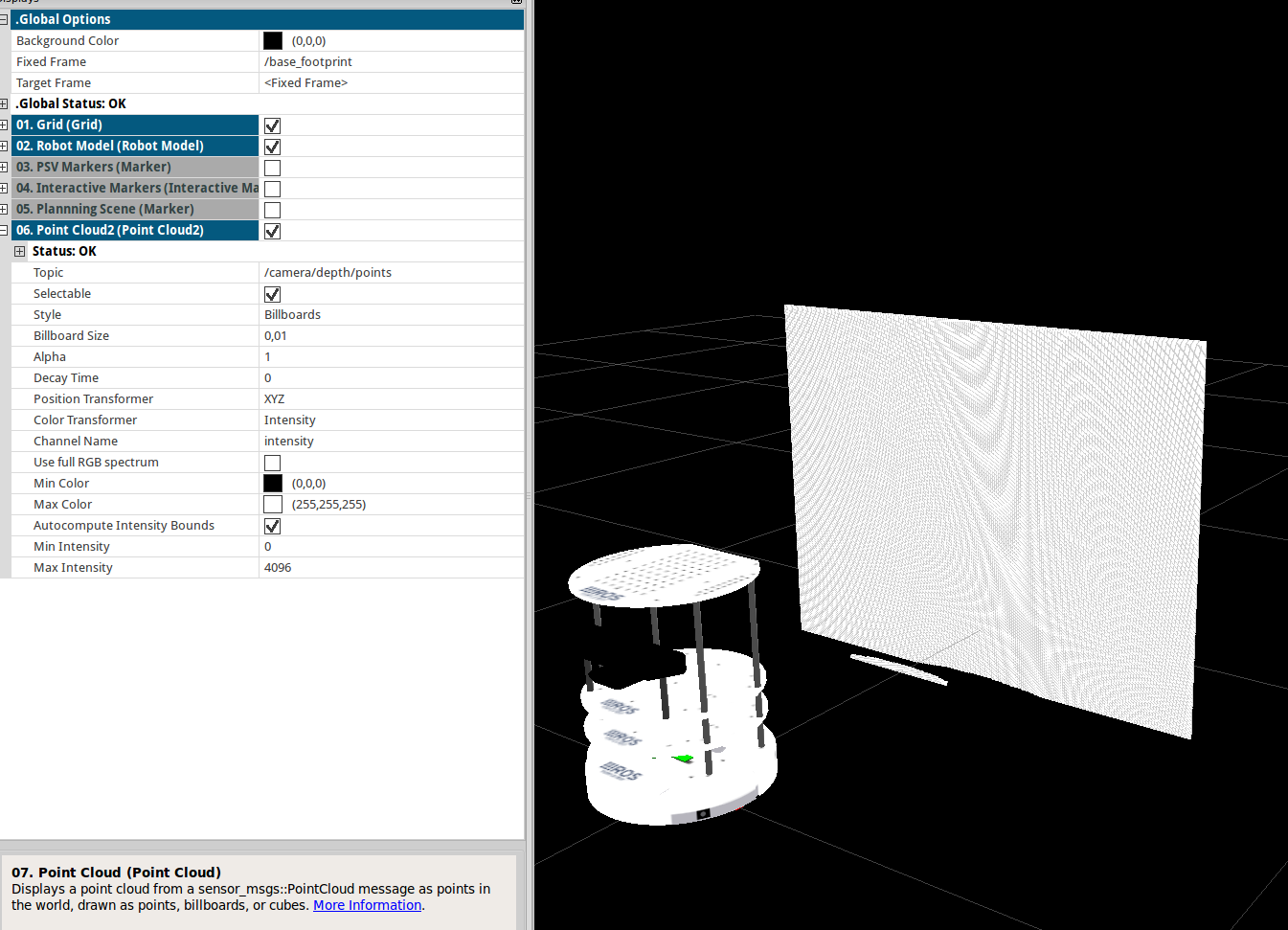
I have problem with simulated Kinect. Turtlebot is placed in some environment (ipa-kitchen from COB stack) and pointcloud from it looks like a plane in front of robot as you can see on screenshot:
Data looks like this:
header:
seq: 4196
stamp:
secs: 305
nsecs: 177000000
frame_id: kinect_depth_optical_frame
height: 480
width: 640
fields:
-
name: x
offset: 0
datatype: 7
count: 1
-
name: y
offset: 4
datatype: 7
count: 1
-
name: z
offset: 8
datatype: 7
count: 1
is_bigendian: False
point_step: 16
row_step: 10240
data: [27, 146, 19, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 222, 27, 19, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0
, 128, 63, 160, 165, 18, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 98, 47, 18, 191, 153, 61, 221, 190, 0, 0, 128, 63,
0, 0, 128, 63, 36, 185, 17, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 230, 66, 17, 191, 153, 61, 221, 190, 0, 0, 128,
63, 0, 0, 128, 63, 169, 204, 16, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 107, 86, 16, 191, 153, 61, 221, 190, 0, 0,
128, 63, 0, 0, 128, 63, 45, 224, 15, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 239, 105, 15, 191, 153, 61, 221, 190, 0
, 0, 128, 63, 0, 0, 128, 63, 177, 243, 14, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 116, 125, 14, 191, 153, 61, 221,
190, 0, 0, 128, 63, 0, 0, 128, 63, 54, 7, 14, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 248, 144, 13, 191, 153, 61, 22
1, 190, 0, 0, 128, 63, 0, 0, 128, 63, 186, 26, 13, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 125, 164, 12, 191, 153, 6
1, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 63, 46, 12, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 1, 184, 11, 191, 153,
61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 195, 65, 11, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 133, 203, 10, 191,
153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 72, 85, 10, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 10, 223, 9, 19
1, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 204, 104, 9, 191, 153, 61, 221, 190, 0, 0, 128, 63, 0, 0, 128, 63, 142, 242, 8
, 191, 153, ...
There are just this two warnings in rxconsole...
gazebo_ros_camera simulation does not support non-zero distortion parameters right now, your simulation maybe wrong.and
Message from [/gazebo] has a non-fully-qualified frame_id [kinect_depth_optical_frame]. Resolved locally to [/kinect_depth_optical_frame]. This is will likely ...
add a comment
