
Why import complicated stl file will caused problem on gazebo?
My cad translate to stl file is

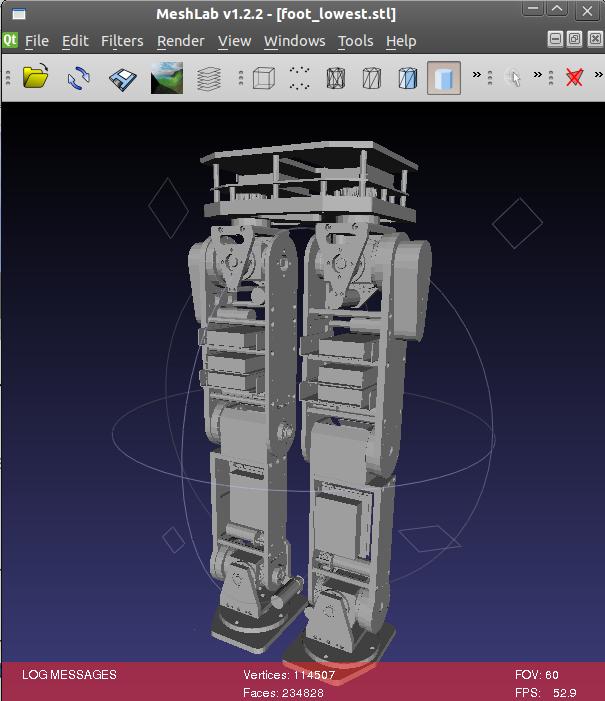
I use meshlab to view it:
But when I import to gazebo.
sam@/home/sam/code/ros/gazebo/stl$ rosrun gazebo spawn_model -file `pwd`/foot.urdf -urdf -model foot_model -z 100.5
loading model xml from file
attempting to spawn robot in simulation
waiting for service spawn_urdf_model
spawn status: SpawnModel: successfully spawned model
spawning success True
sam@/home/sam/code/ros/gazebo/stl$
The model seems very weird even broken to parts.
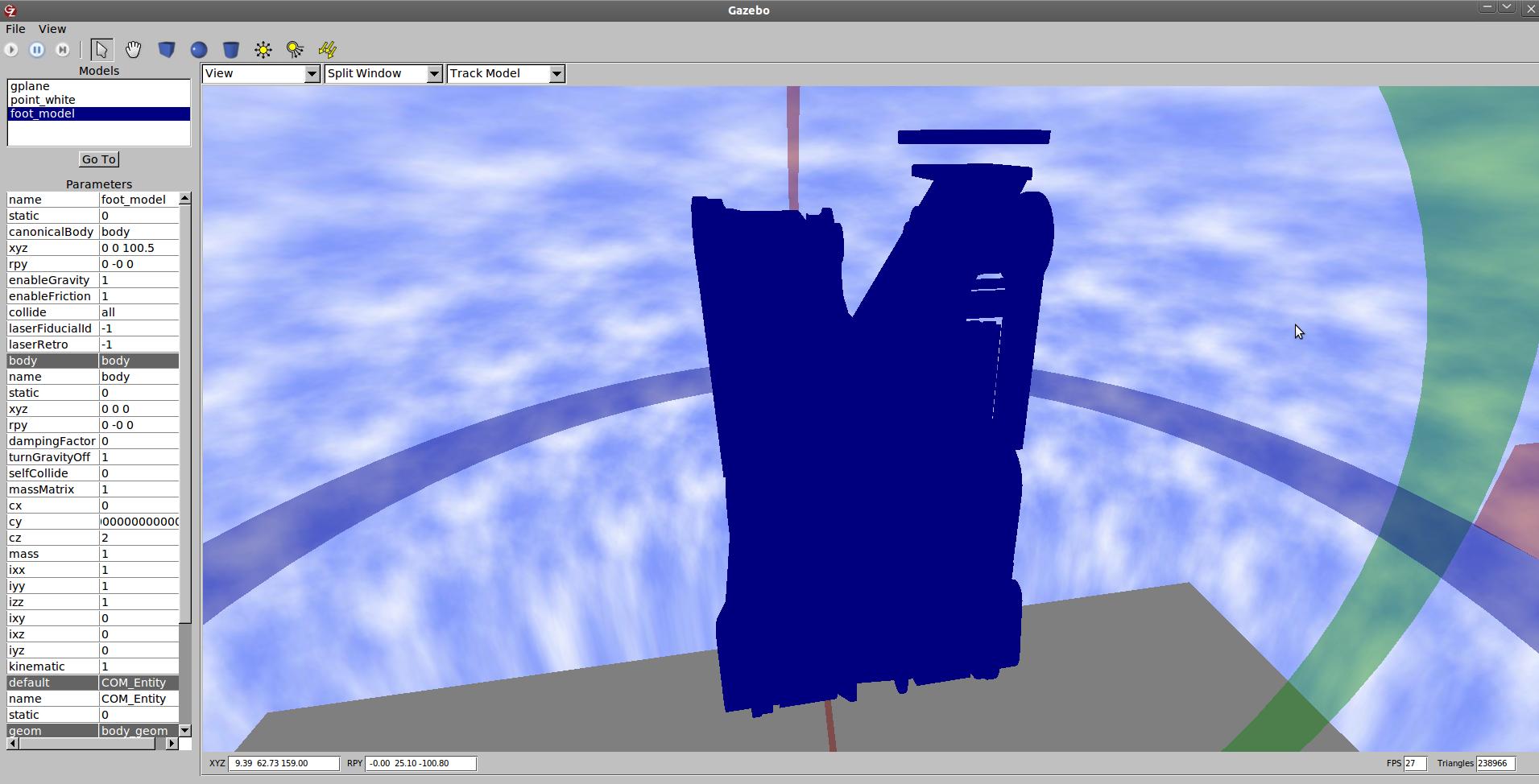
How to solve it? Thank you~~
Comments
Hi Sam, is this a single STL? Multiple STL's connected by joints?
Single STL. I haven't tried Multiple STL's connected by joints.
you can try and import the stl file with some other mesh editors such as meshlab or wings3d (or blender if the top image was not a stl import). If things look ok there, can you post the STL file? thanks.
I have added the picture in meshlab, and I also upload the stl file: http://www.adrive.com/public/8796d1359372a369f97531afc9a972ad728f8e47d46b8746e2a3242b27619be4.html
add a comment
