
different result in binary and source of octomap_server

Hi all,
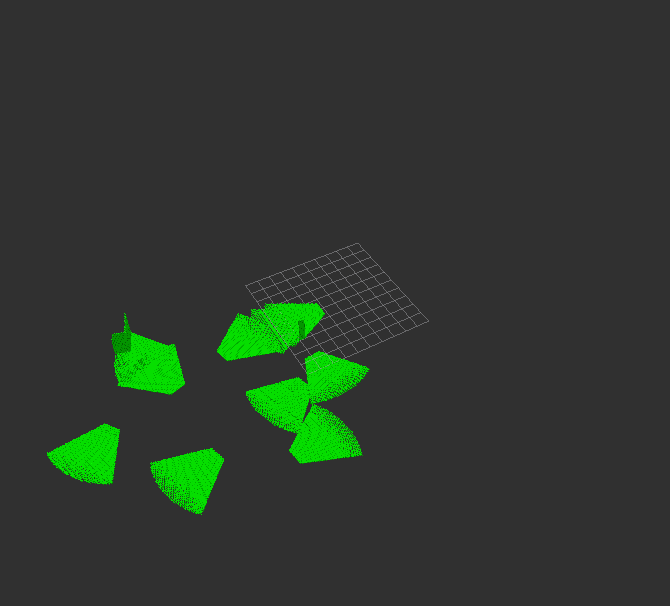
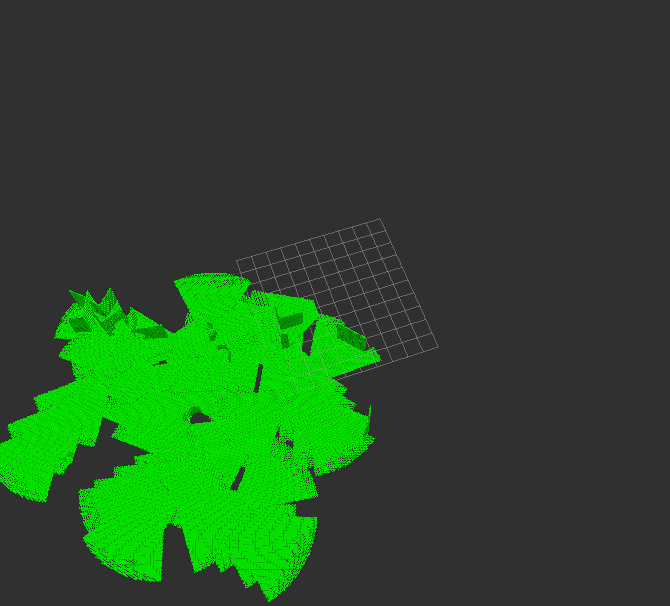
i have a problem, may be someone knows about it, when i install binary octomap_server and run it the result map is excellent but when i use from source and compile it in catkin the result is not continuously, many shots are lost! also the problem is not from tf. I’ve attached the pictures of two situation, the first one is generate by compiled octomap_server and second one is by binary octomap_server. also i downloaded the source from here. also the parameters for both of them are same. mu ubuntu is 12.04 and my ros is hydro.
thanks in advance
add a comment
