
Stereovslam error :: Assertion `left_.tfFrame() == right_.tfFrame()'
After i publish my two left and right videos from stereo camera and run stereo_synchronizer node and stereo_image_proc node everything seems to go file but i get this error from stereo_vslam_node and see no output:
stereo_vslam_node: /opt/ros/diamondback/stacks/vision_opencv/image_geometry/src/stereo_camera_model.cpp:28: bool image_geometry::StereoCameraModel::fromCameraInfo(const sensor_msgs::CameraInfo&, const sensor_msgs::CameraInfo&): Assertion `left_.tfFrame() == right_.tfFrame()' failed.
 You can zoom in the file by opening it in another window.
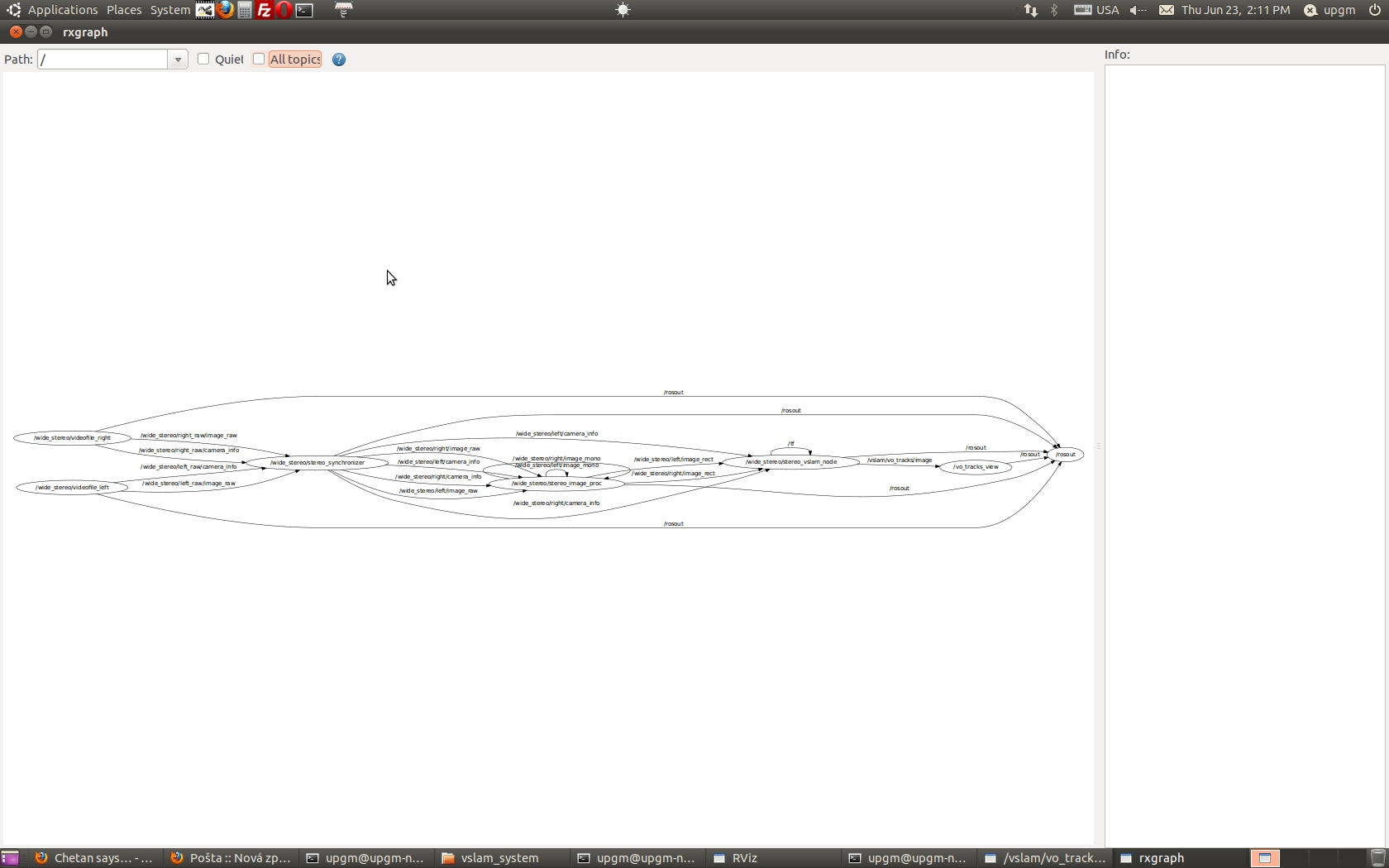
Here is how my system looks , does anybody has anyidea what might be going wrong ??
You can zoom in the file by opening it in another window.
Here is how my system looks , does anybody has anyidea what might be going wrong ??
add a comment
