
Timed out waiting for transform from base_footprint to map to become available before running costmap
As title,
When running move_base, this warning showed up and then process died.
details about the error message:
ROS_MASTER_URI=http://localhost:11311
process[map_server-1]: started with pid [40976]
process[cartographer-2]: started with pid [40977]
process[move_base-3]: started with pid [40978]
[ WARN] [1658282219.609009842, 358.055000000]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 358.054 timeout was 0.1.
[ INFO] [1658282220.096382994, 358.392000000]: global_costmap: Using plugin "static_layer"
[ INFO] [1658282220.112678754, 358.410000000]: Requesting the map...
[ INFO] [1658282220.360217662, 358.614000000]: Resizing costmap to 379 X 374 at 0.050000 m/pix
[ INFO] [1658282220.479364155, 358.713000000]: Received a 379 X 374 map at 0.050000 m/pix
[ INFO] [1658282220.485903135, 358.718000000]: global_costmap: Using plugin "obstacle_layer"
[ INFO] [1658282220.491388655, 358.721000000]: Subscribed to Topics: scan
[ INFO] [1658282220.511445313, 358.738000000]: global_costmap: Using plugin "inflation_layer"
[ INFO] [1658282220.605130716, 358.812000000]: Waypoint planner has been initialized
[ INFO] [1658282220.618342603, 358.823000000]: local_costmap: Using plugin "obstacle_layer"
[ INFO] [1658282220.622837668, 358.823000000]: Subscribed to Topics: scan
[ INFO] [1658282220.649877107, 358.845000000]: local_costmap: Using plugin "inflation_layer"
[ INFO] [1658282220.712694613, 358.890000000]: Created local_planner teb_local_planner/TebLocalPlannerROS
[ INFO] [1658282220.818135275, 358.960000000]: Footprint model 'line' (line_start: [0,0]m, line_end: [0.4,0]m) loaded for trajectory optimization.
[ INFO] [1658282220.818325887, 358.960000000]: Parallel planning in distinctive topologies enabled.
[ INFO] [1658282220.818387784, 358.960000000]: No costmap conversion plugin specified. All occupied costmap cells are treaten as point obstacles.
terminate called after throwing an instance of 'std::bad_alloc'
what(): std::bad_alloc
[move_base-3] process has died [pid 40978, exit code -6, cmd /opt/ros/noetic/lib/move_base/move_base map:=map odom:=/odom_combined cmd_vel:=/navigation/cmd_vel __name:=move_base __log:=/home/usun/.ros/log/3659fbfe-07cf-11ed-b050-e1cb1d9ec4be/move_base-3.log].
log file: /home/usun/.ros/log/3659fbfe-07cf-11ed-b050-e1cb1d9ec4be/move_base-3*.log
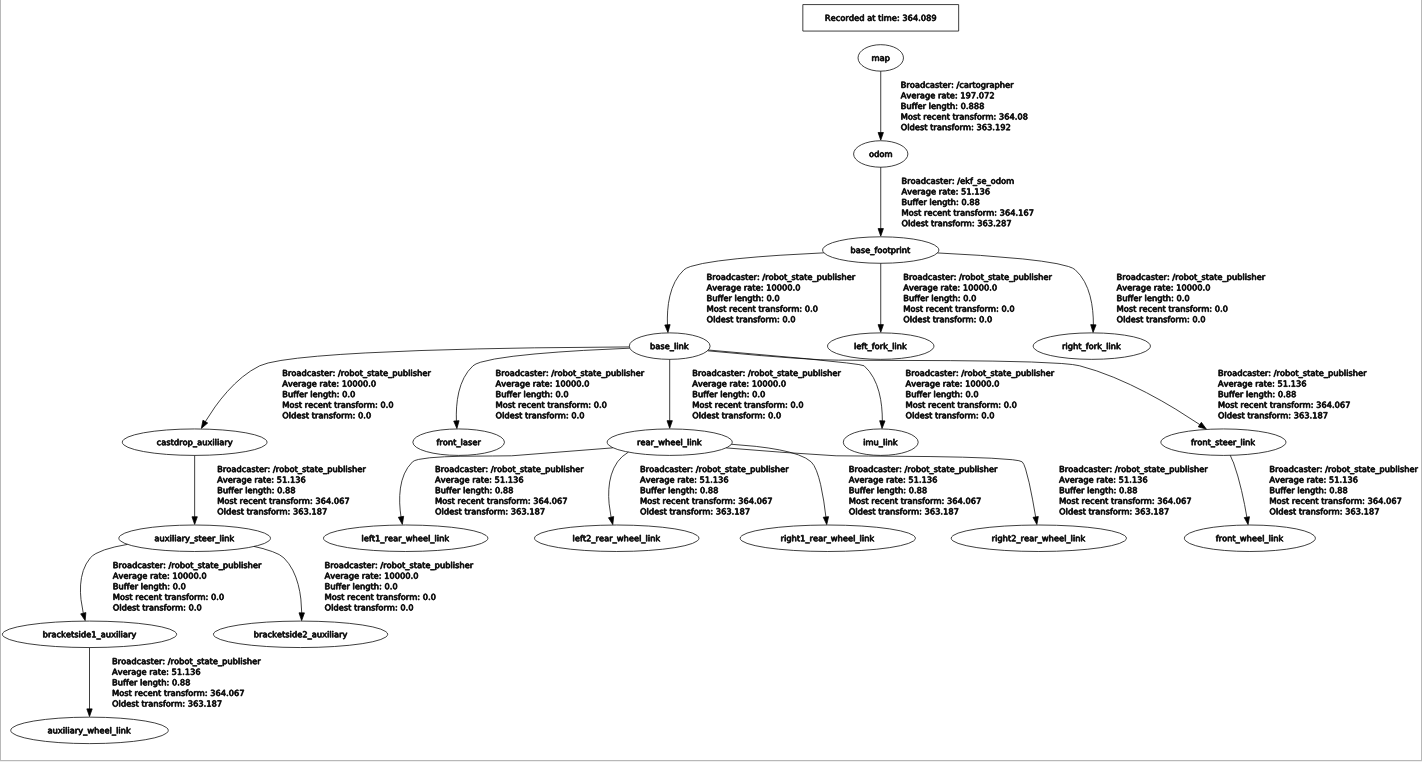
This seems to be a tf error, but when I looked up the tf tree, all the frames connected, see image below.
I've tried to set transform_tolerance parameters of costmaps to 10.0, process still died.
Any suggestion will be highly appreciated. Thanks.

I guess that process died due to "
"
But still no idea how to solve.
You can try to split the launchfile and launch it all step by step. 1. mapserver 2. cartographer 3. movebase
Update:
I think this error does not come from the codes, maybe the system problem, because I reinstalled my Ubuntu 20.04 and ros noetic, cloned same project, then ran it. No error showed up.
@yaiin Thanks for replying. As I updated, the codes can be run very well. Although there's no error showing up now, I still don't know where the previous error came from. I will keep trying to reproduce this error and solve it. Thanks again.
Hi @RyanChen.YLC, I have the same problem too. Do you have any idea now?
Hi, @One2INF.
I think this error may come from the installation of the code (Movebase, TEB, ... etc).
Maybe try git clone source codes to your workspace and run the project again.