
diff_drive_controller oscillates with jerk limits
Hello community,
I use diff_drive_controller for a 2-wheeled robot. Until now only teleop to ease things and get the basics done.
When I use jerk limits, acceleration seems to fit but when robot should stop (linear velocity = 0.0m/s), it starts to oscillate forward/backward for a huge amount of time. My first idea was bad PID settings. But I wasn't able to tune them so I tried without any PID. Even in this case, it oscillate (see pictures).
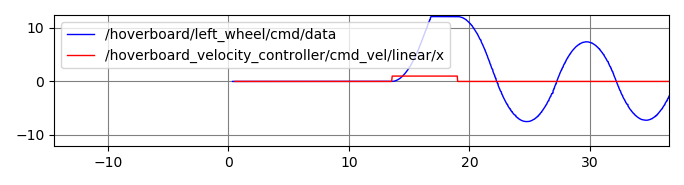
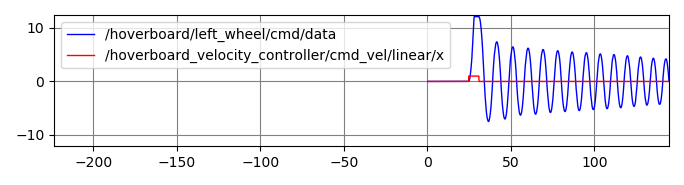
If I disable jerk_limits, it works correct and robot stops after de-acceleration. Any idea whats wrong here? I added some plots containing the cmd_vel I send to controller and the output cmd of one wheel. In all cases, I set linear velocity to 1m/s.
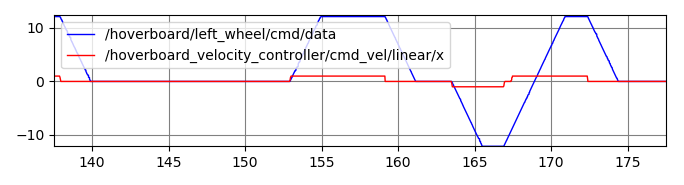
Any ideas what's wrong here?
hoverboard_joint_publisher:
type: "joint_state_controller/JointStateController"
publish_rate: 50
left_wheel : 'left_wheel'
right_wheel : 'right_wheel'
hoverboard_velocity_controller:
type : "diff_drive_controller/DiffDriveController"
left_wheel : 'left_wheel'
right_wheel : 'right_wheel'
publish_rate: 50.0 # default: 50
pose_covariance_diagonal : [0.001, 0.001, 1000000.0, 1000000.0, 1000000.0, 1000.0]
twist_covariance_diagonal: [0.001, 0.001, 1000000.0, 1000000.0, 1000000.0, 1000.0]
# Wheel separation and diameter. These are both optional.
# diff_drive_controller will attempt to read either one or both from the
# URDF if not specified as a parameter
wheel_separation : 0.32
wheel_radius : 0.0825
# Wheel separation and radius multipliers
wheel_separation_multiplier: 1.0 # default: 1.0
wheel_radius_multiplier : 1.0 # default: 1.0
# Velocity commands timeout [s], default 0.5
cmd_vel_timeout: 0.5
# Base frame_id
base_frame_id: base_footprint #default: base_link
allow_multiple_cmd_vel_publishers: true
odom_frame_id: '/raw_odom'
enable_odom_tf: false
# Velocity and acceleration limits
# Whenever a min_* is unspecified, default to -max_*
linear:
x:
has_velocity_limits : true
max_velocity : 1.0 # m/s
has_acceleration_limits: true
max_acceleration : 0.5 # m/s^2
has_jerk_limits : true
max_jerk : 0.1 # m/s^3
angular:
z:
has_velocity_limits : true # was true
max_velocity : 6.28 # rad/s
has_acceleration_limits: true # was true
max_acceleration : 3.14 # rad/s^2
has_jerk_limits : true
max_jerk : 3.14 # rad/s^3

Something to note (also in relation to your previous #q382088): the "limits" here are hard, saturation type limits. They'll be used to implement a cut-off of the incoming signal.
You seem to be looking for a ramp-up/down behaviour, which is not what I believe the
diff_drive_controllerimplements.Packages like yocs_velocity_smoother are used for ramping up and down (be sure to check the
kinetictab for more extensive documentation).