
Costmap2DROS object is not correctly created

Hi
I have created a node to run navFn using costmap_2d without move_base, as in this link: http://lists.ros.org/lurker/message/2... (was http://ros-users.122217.n3.nabble.com...)
I wonder where to start to set up a simple navigation that runs without move_base, in particular a global path planner. For a start, a simple A* on a static map should suffice. From what I've read, costmap_2d and navfn should provide the right functionality, but do they without a running robot? They seem to be tightly coupled with move_base and constant sensor updates. ...
I created a package: ros_global_planners_experiment
under src:
ros_global_planners_experiment_node.cpp
#include <ros/ros.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <navfn/navfn_ros.h>
int main (int argc, char** argv)
{
ros::init(argc, argv,"ros_global_planners_experiment_node");
ros::NodeHandle n("~");
tf::TransformListener tf(ros::Duration(10));
costmap_2d::Costmap2DROS willow_garage_costmap("willowgarage_costmap", tf);
ROS_INFO("Costmap2d node started ...");
navfn::NavfnROS navfn;
navfn.initialize("my_navfn_planner", &willow_garage_costmap);
ros::spin();
return 0;
}
under launch: I created two launch files:
ros_experiment.launch
<launch>
<param name="/use_sim_time" value="false"/>
<arg name="map_file" default="$(find rosbot_navigation)/maps/willowgarage-refined.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<node pkg="tf" type="static_transform_publisher" name="map_to_base_link" args="0 0 0 0 0 0 /map base_link 100" />
<node pkg="costmap_2d" type="costmap_2d_markers" name="voxel_visualizer">
<remap from="voxel_grid" to="costmap/voxel_grid"/>
</node>
<node name="rviz" pkg="rviz" type="rviz" />
<node pkg="ros_global_planners_experiment" type="ros_global_planners_experiment_node" name="ros_global_planners_experiment_node" >
<rosparam file="$(find ros_global_planners_experiment)/launch/ros_experiment_params.yaml" command="load" />
</node>
</launch>
ros_experiment_params.yaml
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 1.0
static_map: true
map_type: costmap
transform_tolerance: 0.3
obstacle_range: 2.5
max_obstacle_height: 2.0
raytrace_range: 3.0
footprint: [[-0.325, -0.325], [-0.325, 0.325], [0.325, 0.325], [0.46, 0.0], [0.325, -0.325]]
footprint_padding: 0.01
inflation_radius: 0.55
cost_scaling_factor: 10.0
lethal_cost_threshold: 100
In terminal: roslaunch ros_global_planners_experiment ros_experiment.launch
In Rviz:
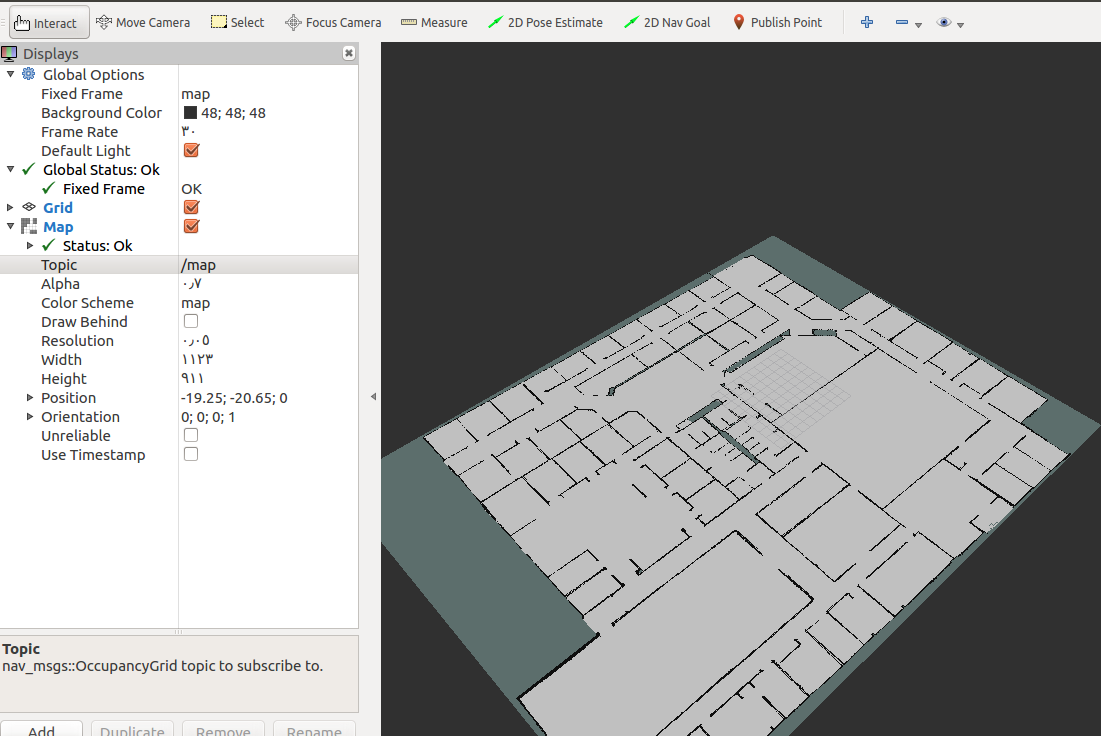
Map ==> choosing Topic /map ==> display willow garage map
 Map ==> choosing Topic /ros_global_planners_experiment_node/willowgarage_costmap/costmap ==> empty squqre, I cannot see willow garage costmap with obstacles?
Map ==> choosing Topic /ros_global_planners_experiment_node/willowgarage_costmap/costmap ==> empty squqre, I cannot see willow garage costmap with obstacles? 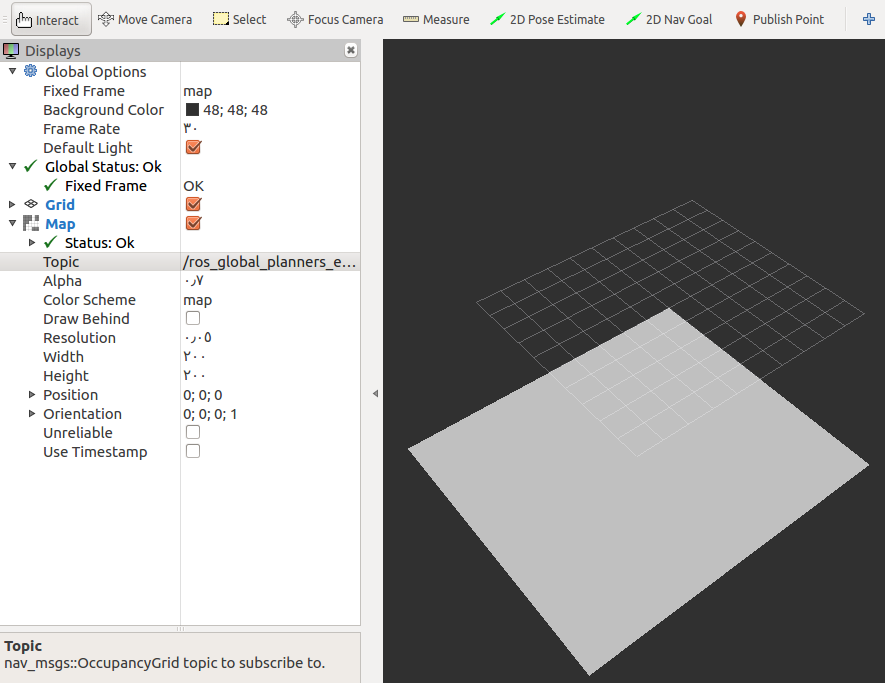
Also, the ROS_INFO("Costmap2d node started ..."); is not shown !

