
after changing the yaw in the map.yaml, costmap does not take that yaw.
I use the below yaml for getting the map using the map_server package. I changed the yaw in the origin tag of the original yaml to -0.102.
map_zone.yaml
image: map_zone.pgm
resolution: 0.050000
origin: [-17.000000, -17.000000, 0.0] #### OLD
origin: [-17.000000, -17.000000, -0.102000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
This change resulted into weird costmap. Please help. My setup is a typical ros navstack using move_base. this also affects amcl slam as localization is way off.
I have already played around with /initial_pose. the setup works fine if i do not change the yaw in the map.yaml file.
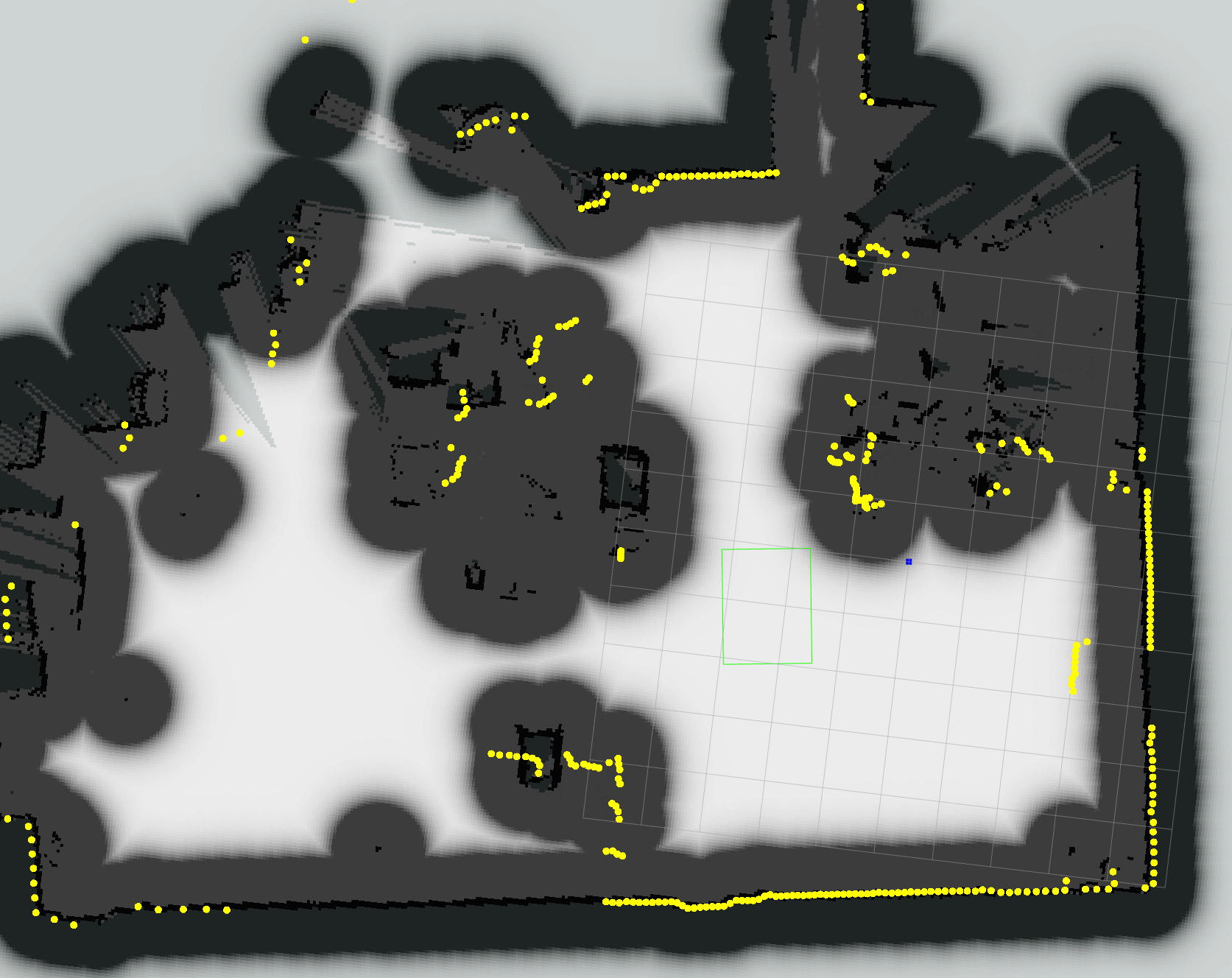
with original yaw=0.0
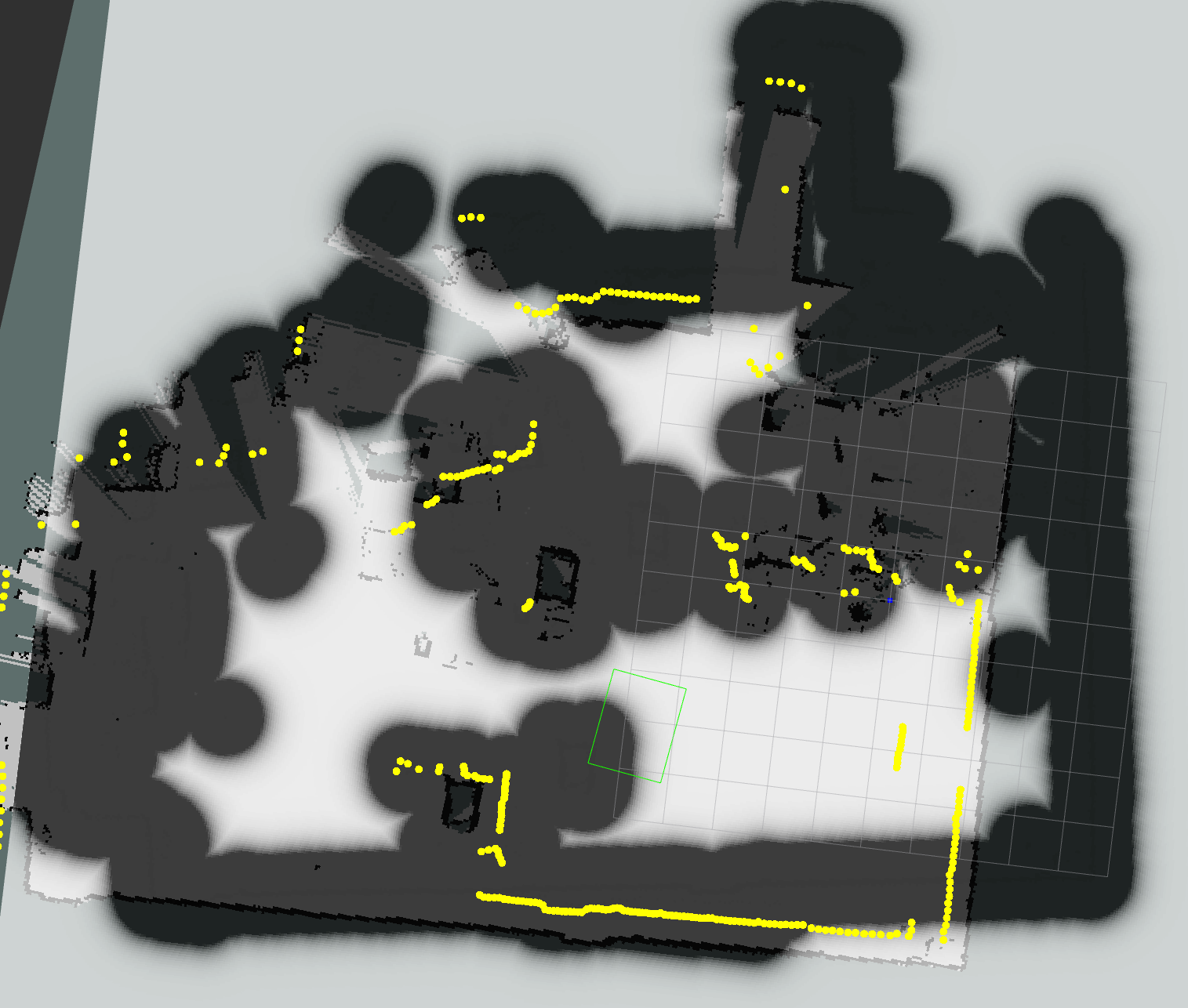
with yaw = -0.0102
 (/upfiles/16046623663103974.png)
(/upfiles/16046623663103974.png)
add a comment

