
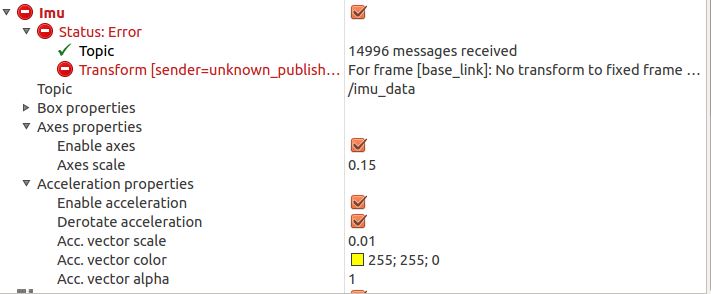
For frame[base_link]: No transform to fixed frame using IMU

Hi all,
I have a mobile robot and I would like it to navigate around a room and I already have a map of the room. I am using rotary encoders for odometry. I am using robot_pose_ekf to merge data from rotary encoders and IMU. I am using amcl for localization and move_base for planning. Now the problem is, when I set the fixed frame in RVIZ as map, the status of IMU keeps on oscillating from Status:OK to following:
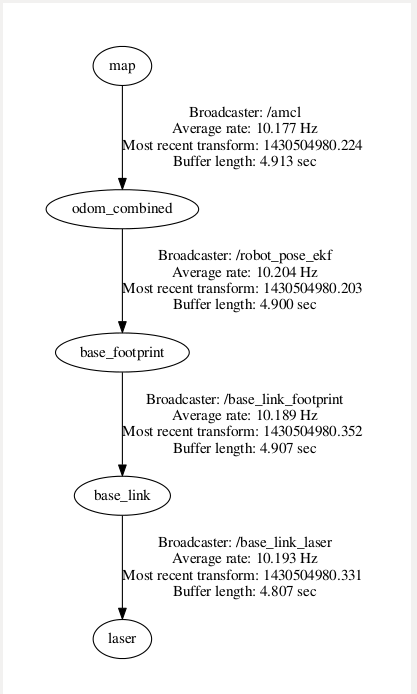
The tf tree is shown which looks good to me: C:\fakepath\tf_tree.png
IMU part of the Code
For IMU, I am using http://wiki.ros.org/phidgets_imu and http://wiki.ros.org/imu_filter_madgwick .
<!-- IMU -->
<node pkg="phidgets_imu" type="phidgets_imu_node" name="IMU_node1" output="screen">
<param name="frame_id" value="base_link"/>
</node>
<node pkg="imu_filter_madgwick" type="imu_filter_node" name="IMU_node2" output="screen">
<param name="use_mag" value="false"/>
<param name="publish_tf" value="false"/>
<param name="fixed_frame" value="odom_combined"/>
<remap from="/imu/data" to="/imu_data"/>
</node>
I am not able to figure out why is this happening because frame id of IMU is base_link and transformation exists between it and the map as can be seen in the tf tree. Does anyone have any idea as to what might be causing this?
Thanks a lot.
Naman Kumar


{kind=link}