
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Suppose I place the accelerometer at an offset from the centre of rotation. Then it would make a circular arc about the centre of the vehicle when the vehicle rotates purely. In that case, measuring X-acceleration and Y-accelerations, and using a kinematic model, can I not see where the accelerometer has gone with respect to the centre of the robot? If I can get that, then I should also be able to get 'theta' right?
Please correct me if I am wrong.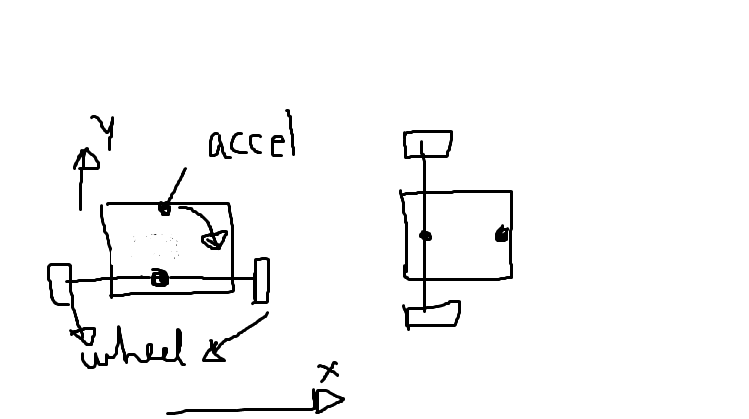
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
