
Use 3-Axis Accelerometer to calculate theta?
Hi,
is it possible to use a 3-Axis Accelerometer to estimate theta for the odometry (on a car-like robot, without a gyroscope)?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi,
is it possible to use a 3-Axis Accelerometer to estimate theta for the odometry (on a car-like robot, without a gyroscope)?
You mean the yaw angle? No, you can't do that with accelerometers, as they measure linear acceleration, not angular rates like gyroscopes do (The angular rate has to be integrated to get an angle estimate in that case).
Using multiple highly accurate accelerometers placed on different parts of the vehicle one could in theory estimate the angular rate, but that's irrelevant here I guess.
Suppose I place the accelerometer at an offset from the centre of rotation. Then it would make a circular arc about the centre of the vehicle when the vehicle rotates purely. In that case, measuring X-acceleration and Y-accelerations, and using a kinematic model, can I not see where the accelerometer has gone with respect to the centre of the robot? If I can get that, then I should also be able to get 'theta' right?
Please correct me if I am wrong.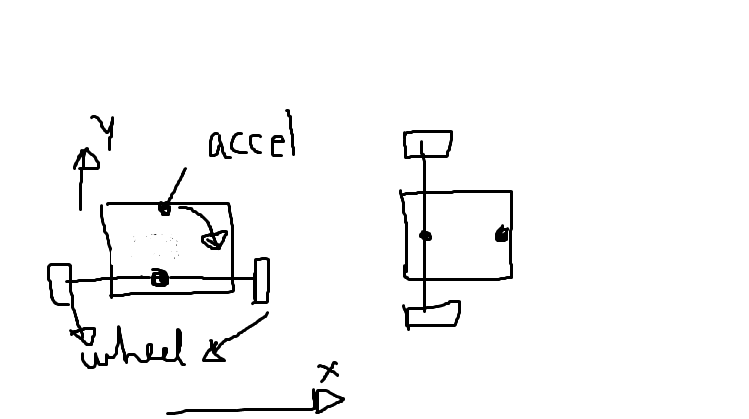
Yes, this is possible in principle (provided one has very high accuracy accelerometers like those in tactical or navigation grade INS systems). From a practical POV, this likely will not work due to the noise characteristics of typical MEMS accelerometers, though.
Asked: 2012-02-20 22:17:27 -0500
Seen: 1,806 times
Last updated: Mar 22 '13
Best method for merging rotation data
ROS Package to filter raw IMU data (Linear Acceleration/Angular Velocity/Magnetic Orientation)
Using navigation stack to create a map using odometry
How to Publish Odometry to use with Hector SLAM
How to Disable Lidar on Turtlebot3
problem with subscribing to a custom message publishing topic
How to Combine URDF with RVIZ and Odometry [closed]
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

