The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2023-08-22 10:16:18 -0500 | received badge | ● Famous Question (source) |
| 2023-07-16 16:48:50 -0500 | received badge | ● Famous Question (source) |
| 2023-06-27 22:52:40 -0500 | received badge | ● Famous Question (source) |
| 2023-05-07 09:49:02 -0500 | asked a question | Need a theoretical explanation about the Cartographer's file submap_painter.cc, especially the function CairoPaintSubmapSlices and the function PaintSubmapSlices. Need a theoretical explanation about the Cartographer's file submap_painter.cc, especially the function CairoPaintSubmap |
| 2023-04-25 20:09:38 -0500 | received badge | ● Notable Question (source) |
| 2023-04-21 20:46:03 -0500 | received badge | ● Popular Question (source) |
| 2023-04-19 22:13:06 -0500 | commented question | How can I start to build a new map and clean the old one in Cartographer? I have tried the service cartographer_ros_msgs/FinishTrajectory. The cartographer seems to stop the charting work. Then, |
| 2023-04-19 08:53:50 -0500 | asked a question | How can I start to build a new map and clean the old one in Cartographer? How can I start to build a new map and clean the old one in Cartographer? I am using the cartographer_node to build the |
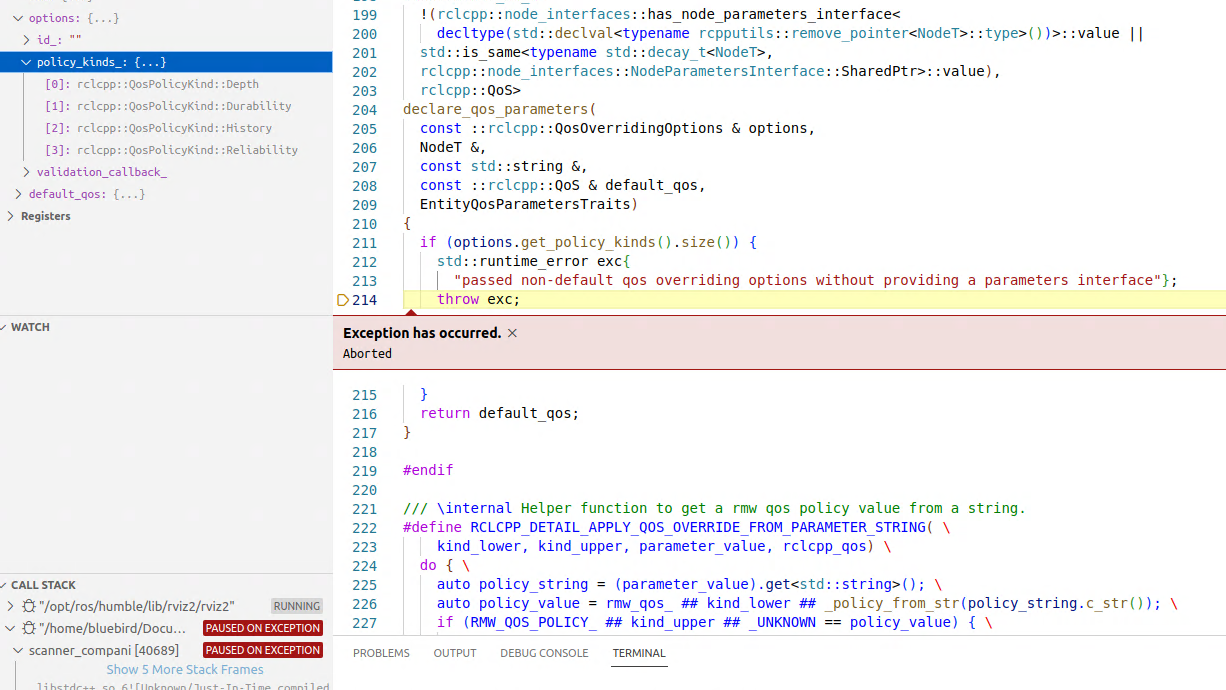
| 2023-04-15 01:32:03 -0500 | marked best answer | Publish dynamic TF with this->get_node_topics_interface() works in foxy but not in humble. (passed non-default qos overriding options without providing a parameters interface) I have posted an issue on GitHub; however, no one responds to it. So I start to wonder if it is my own mistake. It begins from one day when I transform a piece of ROS foxy code into the Humble environment.
It will give you an error. "passed non-default qos overriding options without providing a parameters interface."
You may wonder why you want to write it like this. Why not use 'this' directly. It is because by using node_topics_handle, I can isolate different functions in different classes without passing the shared printer node everywhere. Please, tell me how to publish dynamic TF with node_topics_handle. Thanks. Operating System: Ubuntu 22.04.2 LTS Installation type: binaries Version or commit hash: ROS humble DDS implementation: Fast-RTPS Client library (if applicable): rclcpp |
| 2023-04-14 22:33:36 -0500 | answered a question | Publish dynamic TF with this->get_node_topics_interface() works in foxy but not in humble. (passed non-default qos overriding options without providing a parameters interface) I got an answer from the Url. It should be written as tf_broadcaster_ = std::make_unique<tf2_ros::transformbroad |
| 2023-04-12 20:08:28 -0500 | received badge | ● Notable Question (source) |
| 2023-04-09 21:11:57 -0500 | received badge | ● Popular Question (source) |
| 2023-04-08 02:06:53 -0500 | received badge | ● Notable Question (source) |
| 2023-04-08 01:57:03 -0500 | asked a question | Publish dynamic TF with this->get_node_topics_interface() works in foxy but not in humble. (passed non-default qos overriding options without providing a parameters interface) Publish dynamic TF with this->get_node_topics_interface() works in foxy but not in humble. (passed non-default qos ov |
| 2023-01-11 20:22:21 -0500 | marked best answer | The slam_toolbox for ROS2 foxy does not publish the topic pose. I notice that the slam_toolbox for ROS2 foxy does not publish the topic pose (https://github.com/SteveMacenski/slam...). I have confirmed it on my own virtual machine with the apt-get package. As far as I know, SLAM means mapping and localization. Where does the robot pose goes if the toolbox doesn't publish it? Can I get it from the TF? A similar question can be found on this. |
| 2023-01-11 20:19:19 -0500 | commented answer | SLAM_toolbox : no pose topic published Thank you very much. That helps a lot. |
| 2023-01-09 13:11:22 -0500 | received badge | ● Popular Question (source) |
| 2023-01-07 20:01:42 -0500 | commented answer | SLAM_toolbox : no pose topic published I also try to use the pose map->Odom->base_link? Is it the same pose published on the pose topic for ROS galactic, |
| 2023-01-07 19:57:37 -0500 | asked a question | The slam_toolbox for ROS2 foxy does not publish the topic pose. The slam_toolbox for ROS2 foxy does not publish the topic pose. I notice that the slam_toolbox for ROS2 foxy does not pu |
| 2022-11-23 12:25:47 -0500 | received badge | ● Famous Question (source) |
| 2022-10-12 20:35:37 -0500 | received badge | ● Famous Question (source) |
| 2022-08-14 22:39:22 -0500 | received badge | ● Notable Question (source) |
| 2022-06-29 19:03:09 -0500 | received badge | ● Notable Question (source) |
| 2022-06-26 19:50:33 -0500 | commented question | Nav2 Costmap Plugin Debug Method The nodes in NAV2 are very fragile. Take the controller server as an example. If I use the debugger to pause it, it exis |
| 2022-06-21 09:37:26 -0500 | commented answer | The obstacle is not on my cost map. I used the temporary patch, and it seems to work. it seems to work |
| 2022-06-21 09:34:28 -0500 | marked best answer | The obstacle is not on my cost map. If I give a goal for the robot, it will bump into the obstacle. I am using Humble and NAV2.
local_costmap:
|
| 2022-06-21 09:34:28 -0500 | received badge | ● Scholar (source) |
| 2022-06-20 04:24:42 -0500 | received badge | ● Popular Question (source) |
| 2022-06-20 01:23:40 -0500 | received badge | ● Enthusiast |
| 2022-06-19 22:06:45 -0500 | asked a question | The obstacle is not on my cost map. The obstacle is not on my cost map. If I give a goal for the robot, it will bump into the obstacle. I am using Humble an |
| 2022-06-18 09:05:12 -0500 | received badge | ● Notable Question (source) |
| 2022-06-18 09:01:59 -0500 | commented question | The function IncludeLaunchDescription in ROS Humble run launch file twice! My process reminds me that the following codes seem run only once. import os from launch import LaunchDescription impor |
| 2022-06-18 08:57:35 -0500 | received badge | ● Popular Question (source) |
| 2022-06-17 03:34:08 -0500 | received badge | ● Student (source) |
| 2022-06-16 21:47:06 -0500 | asked a question | The function IncludeLaunchDescription in ROS Humble run launch file twice! The function IncludeLaunchDescription in ROS Humble run launch file twice! Required Info: Operating System: Ubuntu Ub |
| 2022-06-10 08:07:42 -0500 | received badge | ● Supporter (source) |
| 2022-05-31 17:39:03 -0500 | received badge | ● Popular Question (source) |
| 2022-05-30 01:36:55 -0500 | asked a question | Questions related to currently usage of AMCL’s parameters in NAV2 Questions related to currently usage of AMCL’s parameters in NAV2 As a new user, I don't think I can understand every pa |
| 2022-05-24 05:24:21 -0500 | received badge | ● Popular Question (source) |
| 2022-05-23 19:58:00 -0500 | commented answer | The deep understanding about the config file of cartographer ROS. Yep! Good idea. |
| 2022-05-23 01:16:48 -0500 | asked a question | The deep understanding about the config file of cartographer ROS. The deep understanding about the config file of cartographer ROS. Please check my understanding about the 'cartographer. |
| 2022-05-23 01:05:44 -0500 | received badge | ● Popular Question (source) |
| 2022-03-07 10:08:33 -0500 | asked a question | My timing accuracy is related to the number of spin_once. My timing accuracy is related to the number of spin_once. I try to call service 'compute_rectangle_area' at a constant r |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.