The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-01-24 01:12:42 -0500 | received badge | ● Good Answer (source) |
| 2018-10-16 12:54:14 -0500 | received badge | ● Great Answer (source) |
| 2018-10-16 12:54:14 -0500 | received badge | ● Guru (source) |
| 2016-04-04 08:15:38 -0500 | received badge | ● Nice Answer (source) |
| 2015-07-23 20:40:33 -0500 | received badge | ● Nice Answer (source) |
| 2015-06-22 01:27:56 -0500 | marked best answer | Updating Costmap2D with a static map Hello everyone, I'm working on exploration of unknown maps with mobile robots. I would like to know if there is a way to update a costmap from a static map (e.g. the one created by gmapping) in place of using the I need this because otherwise sometimes my exploration costmap gets noisy. As an alternative can the clear_costmap_recovery be used for a custom costmap in order to reinitialize the map from a static map? Thank you in advance! |
| 2014-11-12 06:37:03 -0500 | received badge | ● Famous Question (source) |
| 2014-10-14 16:56:12 -0500 | received badge | ● Good Answer (source) |
| 2014-10-07 04:01:24 -0500 | commented question | Package running in 64 bit, not running in 32 bit So are the callbacks executing at a lower rate or they are not executing at all? Are the two machines equivalent in terms of CPU, RAM etc? |
| 2014-10-07 02:39:11 -0500 | commented question | Package running in 64 bit, not running in 32 bit Can you please post the error that you get during execution? |
| 2014-09-16 08:38:45 -0500 | received badge | ● Good Answer (source) |
| 2014-09-16 08:38:42 -0500 | received badge | ● Good Question (source) |
| 2014-09-01 05:19:44 -0500 | received badge | ● Notable Question (source) |
| 2014-09-01 05:19:44 -0500 | received badge | ● Popular Question (source) |
| 2014-09-01 04:23:49 -0500 | received badge | ● Good Answer (source) |
| 2014-08-29 12:40:18 -0500 | received badge | ● Nice Answer (source) |
| 2014-08-29 09:53:49 -0500 | answered a question | What topics does Kinect publish? You can access to PointCloud, Depth image and RGB image. You can use openni_launch to bring up the topics you need. |
| 2014-06-24 08:37:56 -0500 | commented answer | openni_tracker using two Kinects problem. If the problem is solved, please check the answer as correct |
| 2014-06-24 05:24:11 -0500 | answered a question | openni_tracker using two Kinects problem. I don't know if you can run the openni_tracker on 2 kinects, but in this case I think the problem is that the second node you run has the same name as the first, which is then stopped. So I suggest you to make a launch file where you launch 2 nodes with different names and different parameters. |
| 2014-06-03 05:31:57 -0500 | received badge | ● Nice Answer (source) |
| 2014-05-19 00:16:09 -0500 | received badge | ● Nice Answer (source) |
| 2014-05-16 04:26:21 -0500 | commented question | rgbdslam indigo http://answers.ros.org/question/91111/rgbdslam-in-ros-hydro/ |
| 2014-05-15 08:33:50 -0500 | received badge | ● Nice Answer (source) |
| 2014-05-13 20:47:09 -0500 | answered a question | Build packages with more than one .cpp The undefined reference error means that it can't find the target library. If you haven't done it, you must add the command: Since the P.S. If I'm not wrong the command |
| 2014-05-13 03:19:05 -0500 | commented question | Build packages with more than one .cpp I suppose you get the error when the add_executable and the target_link_libraries for the test_imu_node are not commented. There is a missing closed bracket in the target_link_libraries for the test_imu_node. I don't know if this is the problem, can you please say otherwise which error gives you the compiler? |
| 2014-05-13 02:35:51 -0500 | commented question | Build packages with more than one .cpp Can you please edit your question adding your CMakeLists.txt? |
| 2014-05-06 03:51:16 -0500 | marked best answer | Bride compilation error Hello everyone! I'm trying to install bride following those instructions, but when I try to run the command 'make' inside bride folder I get this error: I triyed both with release 0.2 and branch groovy. I'm working with Ubuntu 12.04 32-bit and with ros hydro. Can someone help me? Thank you! |
| 2014-05-06 03:51:14 -0500 | commented answer | Bride compilation error Thanks I downloaded it using apt-get! |
| 2014-04-28 18:57:18 -0500 | received badge | ● Famous Question (source) |
| 2014-04-21 23:32:37 -0500 | received badge | ● Famous Question (source) |
| 2014-04-20 06:56:23 -0500 | marked best answer | Object recognition kitchen capture orb_template Hello everybody! I'm trying to use the ORK on ubuntu 12.04 with ros Hydro. I installed it using sudo apt-get install ros-hydro-object-recognition-*. I did not install couchapp (sudo pip install -U couchapp), as, if I understood well, it is not necessary. Now, following this tutorial, I have a kinect connected to my computer and running: works properly, as I can see the depth image with image_view. However, when I try to use the command: what happens is that the depth image that appears is all black and the ORB window all red. Moreover I noticed that if I try to run this command with the image_view running and showing the depth image, the image_view stops to be updated, i.e. the openni.launch doesn't publish anymore the /camera/depth/image topic. Also when I stop running the orb_template command, the depth image topic still isn't published. Any help would be appreciated! Thanks!! EDIT: this is the output of the command |
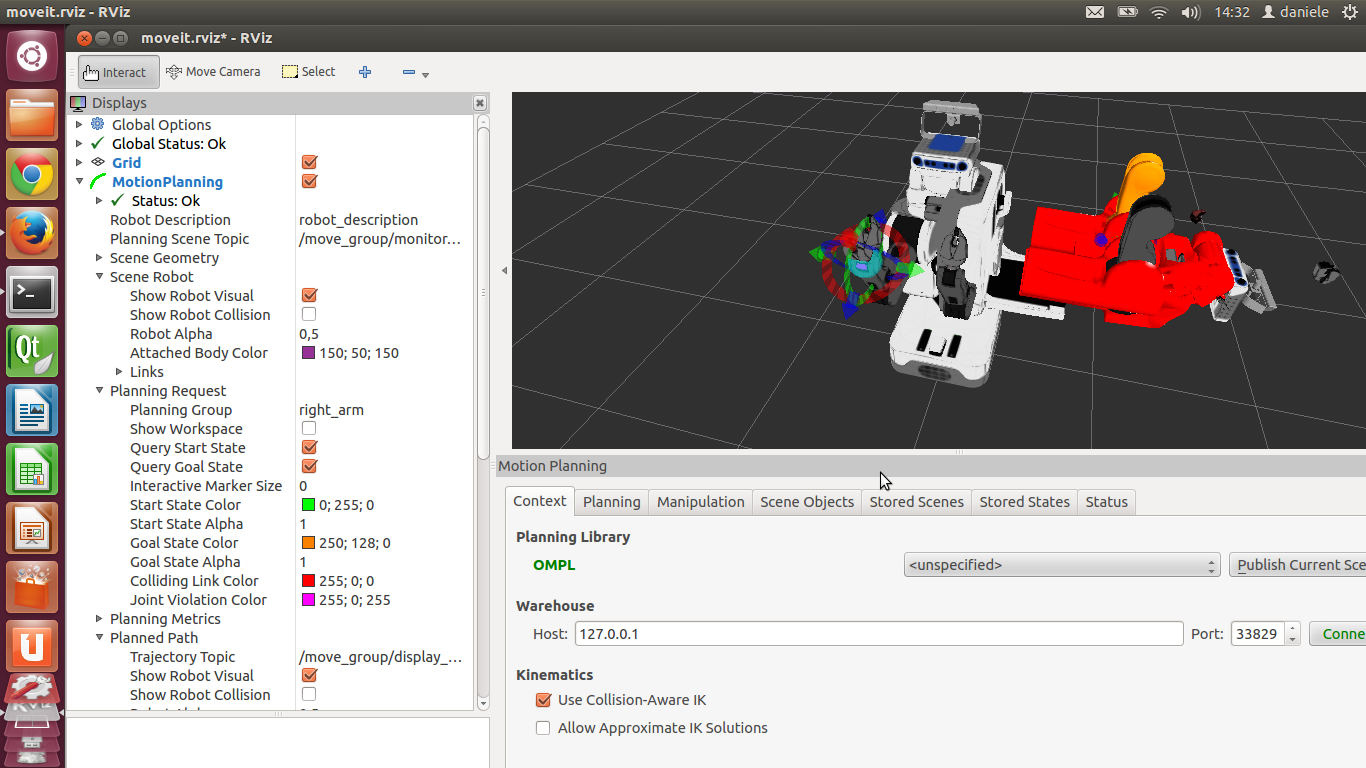
| 2014-04-20 06:56:16 -0500 | marked best answer | Moveit rviz plugin pr2 demo not working Hello everybody! I'm trying to use moveit on ros hydro, I'm on Ubuntu 12.04 32 bit. I installed it using the commands: when launching
following the tutorial I changed some parameters like the Planning Scene Topic and finally the second pr2 disappears. But when I move around the start position and the goal position (making sure they are not in collision) and I click the 'plan' button nothing happen. If I try 'plan and execute' the second pr2 appears again and it seems like something is moving, but with the robot disassembled it's difficult to tell it! Can someone help me? Thanks!! |
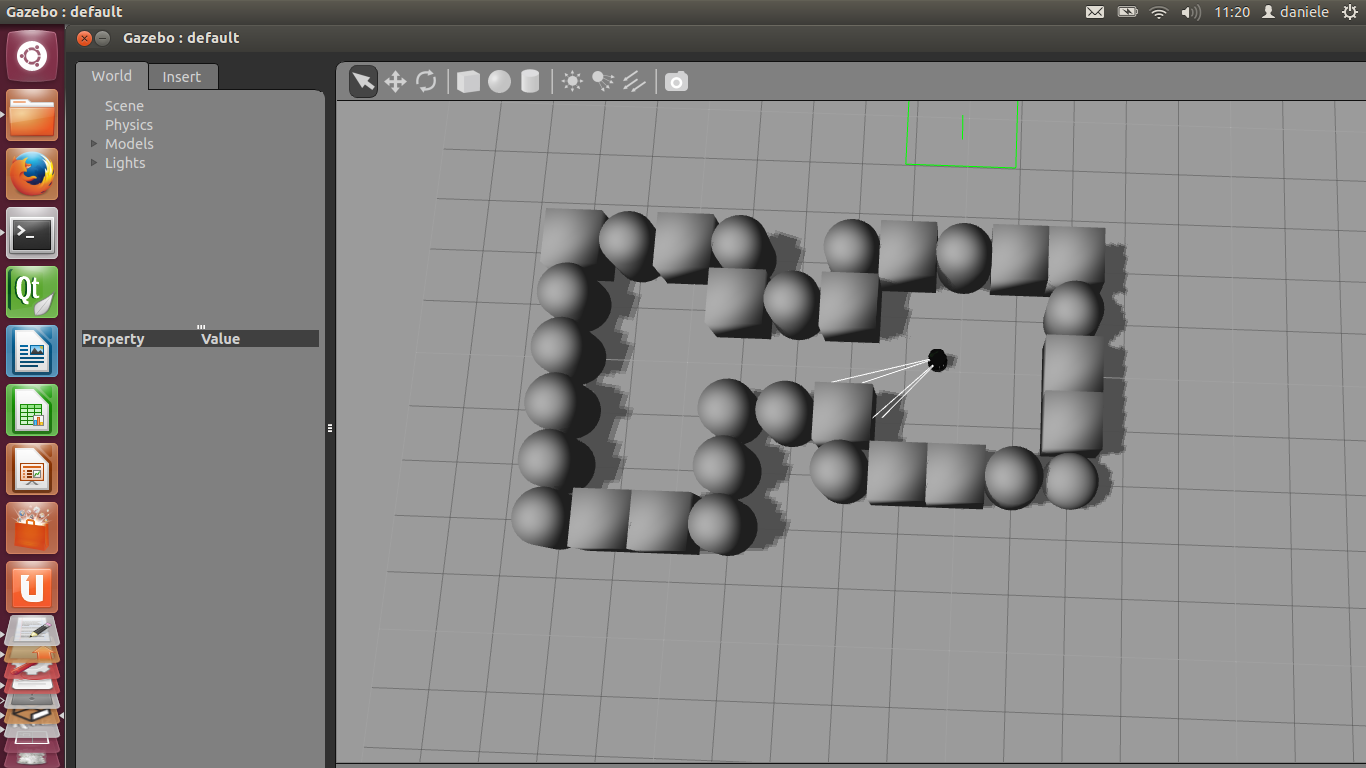
| 2014-04-20 06:56:04 -0500 | marked best answer | Hector slam with turtlebot in Gazebo Hello, I'm trying to properly use Hector slam in simulation using a turtlebot. I'm using ROS hydro and Gazebo 1.9 on ubuntu 12.04. Once I spawned in Gazebo the turtlebot and the world I created, I use this launch file to start hector slam: The slam seems to work when I navigate the robot around, but I'm very surprised by the bad result compared to gmapping. It get lost very easily and the map is very bad. I would like to know if I set up something in the wrong way, or if it depends from the fact that I'm using a fake laser from kinect or maybe that the world in gazebo I created is challenging for hector slam. EDIT: If I move the robot only forward/backward the map is correctly reconstructed, but if I make the robot rotate on itself it prints 'SearchDir angle change too large' and it gets totally lost (sometimes it makes position jumps up to 1 meter and more!!). This is the world I'm using in gazebo:
Many thanks!! |
| 2014-04-20 06:56:02 -0500 | marked best answer | Rgbdslam in ros hydro Hello, I'm trying to use the rgbdslam package in ROS Hydro (on Ubuntu 12.04), but I'm experiencing some difficulties. First of all I had to install the arm_navigation stack and the octomap_server (I used the hydro-devel catkin version for this one), and I managed to do it. Now the problem is in the rgbdslam package. After following those instructions for groovy: http://answers.ros.org/question/74899/rosmake-rgbdslam_freiburg-error-in-groovy/ (can't post the right link due to lack of karma), I'm now trying to build it with rosbuild, but for now it gives me the error: octomap_ros/OctomapROS.h: No such file or directory I've seen that this file has been removed in Hydro. Moreover I suppose I will have to change something for the usage of point cloud library, since in hydro has changed very much. Can someone help me to use the rgbdslam in hydro? Thank you! |
| 2014-04-14 09:25:52 -0500 | received badge | ● Nice Answer (source) |
| 2014-04-08 18:13:02 -0500 | received badge | ● Taxonomist |
| 2014-04-07 05:52:27 -0500 | answered a question | How to add message dependencies if they are located in the same package? I think it should work normally... Look for example at this package and see if you are missing something. Here for example JointVelocities.msg depends on JointValue.msg. Let me know if it works, otherwise please post the CMakeLists.txt you are using. |
| 2014-04-07 02:24:48 -0500 | commented question | Creating a ROS msg Please edit also your question posting your CMakeLists.txt. |
| 2014-04-07 00:06:15 -0500 | commented answer | name of ros message Again, look at the tutorial I linked in my answer. This assumes obviously that you have done the previous tutorials and that you have programming knowledge in python (or C++). |
| 2014-04-07 00:03:54 -0500 | commented question | Creating a ROS msg Please give more details of what you are doing and of the error you get. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.