The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-01-31 06:08:43 -0500 | received badge | ● Famous Question (source) |
| 2022-11-18 05:20:16 -0500 | received badge | ● Notable Question (source) |
| 2022-11-18 05:20:16 -0500 | received badge | ● Popular Question (source) |
| 2022-09-09 02:11:47 -0500 | edited question | Invalid TF for multi tb3 setup in nav 2 Invalid TF for multi tb3 setup in nav 2 Hi there, Am trying to set up a multiple robot simulator in Gazebo with two tur |
| 2022-09-09 01:54:50 -0500 | edited question | Invalid TF for multi tb3 setup in nav 2 Invalid TF for multi tb3 setup in nav 2 Hi there, Am trying to set up a multiple robot simulator in Gazebo with two tur |
| 2022-09-09 01:42:47 -0500 | asked a question | Invalid TF for multi tb3 setup in nav 2 Invalid TF for multi tb3 setup in nav 2 Hi there, Am trying to set up a multiple robot simulator in Gazebo with two tur |
| 2022-08-14 21:17:37 -0500 | received badge | ● Famous Question (source) |
| 2022-06-14 13:05:45 -0500 | received badge | ● Popular Question (source) |
| 2022-06-13 02:41:23 -0500 | asked a question | Error when sourcing ROS Noetic Error when sourcing ROS Noetic Hi, when I source noetic by typing into the terminal source /opt/ros/noetic/setup.bas |
| 2022-04-22 08:40:06 -0500 | received badge | ● Famous Question (source) |
| 2021-11-09 19:35:06 -0500 | received badge | ● Notable Question (source) |
| 2021-09-14 20:11:03 -0500 | received badge | ● Popular Question (source) |
| 2021-08-19 04:14:01 -0500 | asked a question | TEB Local Planner jerky in negative x direction TEB Local Planner jerky in negative x direction When I issue the robot command goal to go forward in the map in real li |
| 2021-08-19 03:37:57 -0500 | received badge | ● Famous Question (source) |
| 2021-08-13 04:32:23 -0500 | received badge | ● Nice Question (source) |
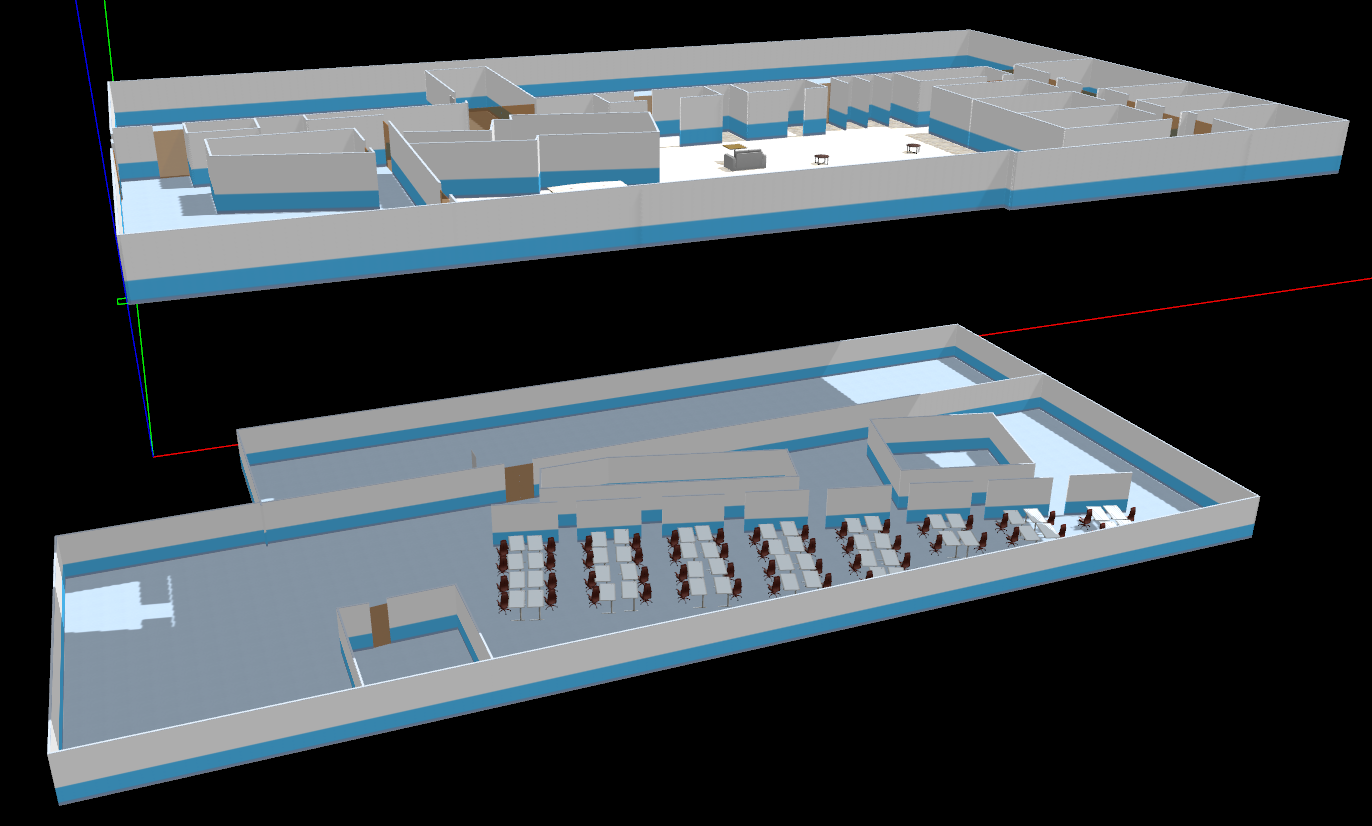
| 2021-08-13 00:45:43 -0500 | marked best answer | Running Turtlebot Navigation Stack on multiple floors I currently have a Gazebo world that I generated with two levels. Level 9 (z=0) and Level 10 (z= 20).
When I am using the navigation stack on level 9, the local costmap and global costmap is being generated. It is able to navigate successfully. However, when I move to level 10, the local costmap is not being generated and the robot relies purely on the global costmap to avoid obstacles. Is there a way to fix this. I am using the turtlebot simulation stack found on github. Would appreciate any pointers as I have started playing with the local cost params but that does not seem to be affecting anything. |
| 2021-08-13 00:45:43 -0500 | received badge | ● Scholar (source) |
| 2021-08-13 00:45:35 -0500 | answered a question | Running Turtlebot Navigation Stack on multiple floors Hi, So I think I have found the solution, although it seems to be a patch more than an actual solution. As I said before |
| 2021-08-13 00:42:40 -0500 | commented question | Running Turtlebot Navigation Stack on multiple floors Just managed to get it to work, have added the answer below. |
| 2021-07-13 06:37:26 -0500 | received badge | ● Notable Question (source) |
| 2021-07-09 00:04:55 -0500 | received badge | ● Enthusiast |
| 2021-07-08 02:34:23 -0500 | edited question | Running Turtlebot Navigation Stack on multiple floors Running Turtlebot Navigation Stack on multiple floors I currently have a Gazebo world that I generated with two levels. |
| 2021-07-08 02:34:23 -0500 | received badge | ● Editor (source) |
| 2021-07-08 02:11:00 -0500 | commented question | Running Turtlebot Navigation Stack on multiple floors Unfortunately those implementations don't seem to work right now and don't solve my problem. My problem is specifically |
| 2021-07-08 02:08:56 -0500 | received badge | ● Popular Question (source) |
| 2021-07-07 20:54:52 -0500 | received badge | ● Student (source) |
| 2021-07-07 20:18:16 -0500 | commented answer | Running Turtlebot Navigation Stack on multiple floors Hi, but even after loading a new map everytime it switches floors, the global costmap is able to update itself but the l |
| 2021-07-07 06:42:14 -0500 | received badge | ● Supporter (source) |
| 2021-07-07 05:30:35 -0500 | received badge | ● Notable Question (source) |
| 2021-07-07 05:30:35 -0500 | received badge | ● Popular Question (source) |
| 2021-07-07 05:19:26 -0500 | edited question | Running Turtlebot Navigation Stack on multiple floors Running Turtlebot Navigation Stack on multiple floors I currently have a Gazebo world that I generated with two levels. |
| 2021-07-07 05:18:48 -0500 | asked a question | Running Turtlebot Navigation Stack on multiple floors Running Turtlebot Navigation Stack on multiple floors I currently have a Gazebo world that I generated with two levels. |
| 2020-12-28 00:49:57 -0500 | answered a question | Callback not being called on first spinOnce() So I've figured it out. When I was debugging it, it seemed to me like that there was no connection to the turtlesim Pose |
| 2020-12-28 00:49:57 -0500 | asked a question | Callback not being called on first spinOnce() Callback not being called on first spinOnce() I am using Melodic on Ubuntu 18.04 and using the turtlesim_node from turtl |
| 2020-12-27 07:24:55 -0500 | received badge | ● Rapid Responder (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.