The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-05-01 01:09:16 -0500 | received badge | ● Taxonomist |
| 2015-04-16 05:18:16 -0500 | received badge | ● Famous Question (source) |
| 2013-07-14 21:17:32 -0500 | commented question | Rviz does not display image (invalid drawable) on Mac OSX 10.8.3 @Art if you use ogre-1.8.1, for the missing libOgreMain.dylib create a symbolic link form the Ogre.framework/Ogre , after that rviz should be able to compile with orge 1.8.1. ex. ln -s /usr/local/Cellar/ogre/1.8.1/lib/Release/Ogre.framework/Ogre /usr/local/Cellar/ogre/1.8.1/lib/libOgreMain.dylib |
| 2013-05-11 08:53:40 -0500 | received badge | ● Notable Question (source) |
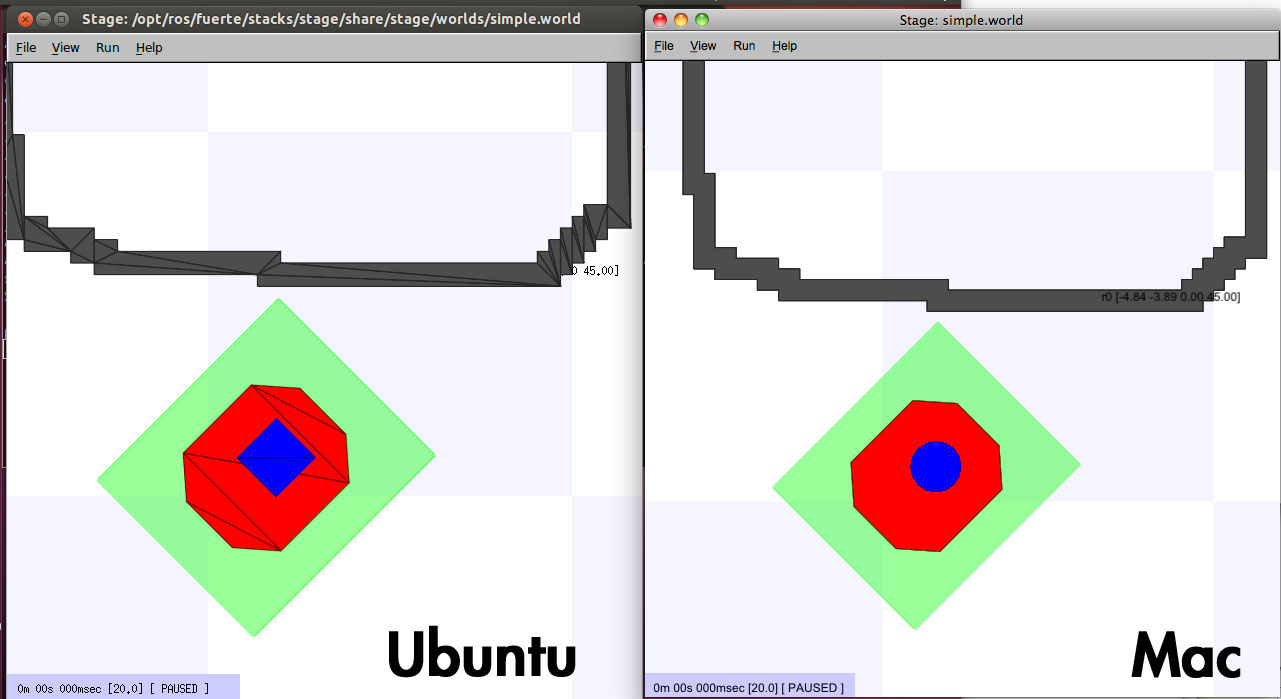
| 2013-04-25 02:20:54 -0500 | commented question | Diagonal lines in polygon in ROS Stage After working on this problem for a while. Finally I can confirm this is graphic card driver related issue. If you have correct graphic driver with hardware GPU acceleration, the diagonal line will not show up. I still have problem with HD4000 driver on Ubuntu 12.04 or display in VMware. |
| 2013-04-11 09:44:28 -0500 | received badge | ● Popular Question (source) |
| 2013-04-07 13:58:49 -0500 | received badge | ● Necromancer (source) |
| 2013-04-07 13:56:43 -0500 | answered a question | [turtle_pointer-6] process has died when running tf tutorial I tried everything only adding Exceptions works for me. |
| 2013-04-02 11:47:57 -0500 | answered a question | Painting a cell in Stage Do you need to change the Start and End point during the runtime? If not you can create a way-point mark ( none obstacle ) for it to show the start and end point. |
| 2013-04-02 10:33:01 -0500 | received badge | ● Student (source) |
| 2013-04-02 10:31:32 -0500 | received badge | ● Teacher (source) |
| 2013-04-02 09:22:30 -0500 | answered a question | Husky not sending odometry data If you have Husky A200 running with the computer already setup ROS with it. Make sure the Husky communication light is on(Green when no e-stop/yellow when e-stop), before you try to do anything else. Usually the communication is trigger by the event the Ethernet cable plugin to the computer ( depend on the setup you have) "eth0". If the communication light is on. You should see the data form |
| 2013-04-02 08:56:53 -0500 | answered a question | Robot in Stage with two Infrared Sensors I have two Sharp GP2D12 IR sensor for my old roomba-create project. This is the setting for the sensor in the world file, they will use the same interface as laser. You can adjust the fov depending on your actual setup on the robot. |
| 2013-04-02 05:06:40 -0500 | received badge | ● Supporter (source) |
| 2013-04-02 04:34:39 -0500 | received badge | ● Editor (source) |
| 2013-04-02 04:32:19 -0500 | asked a question | Diagonal lines in polygon in ROS Stage Hi everyone My Stage just can't display the "block" section world file correctly in Ubuntu 12.04 64bit. All the object in Stage world are all has diagonal lines in polygon. The same world file is displaying correctly in Stage4 on Mac. Is anyone know what cause this problem? and how to fix it. Thank you for the help. This is my system: Max OSX 10.6.8 - VMware Fusion 5.0.2 , install Ubuntu 12.04 64bit, ROS-Fuerte . Screen shot form my Stage4 simple.world on Ubuntu and Mac
|
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.