The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-12-18 13:21:57 -0500 | marked best answer | Error running the autoware runtime manager I try to run the autoware rosbag demo (https://github.com/autowarefoundation...) but the autoware runtime manager reports following error after launching it using ./run I have installed autoware v1.12.0 from source (https://gitlab.com/autowarefoundation...) on ubuntu 18.04. with ROS melodic. The output of locale is: Can somebody help me with this issue? |
| 2020-09-24 03:04:46 -0500 | received badge | ● Taxonomist |
| 2019-12-07 10:28:07 -0500 | received badge | ● Famous Question (source) |
| 2019-10-24 06:59:43 -0500 | received badge | ● Famous Question (source) |
| 2019-09-12 18:17:39 -0500 | received badge | ● Famous Question (source) |
| 2019-09-11 16:46:49 -0500 | received badge | ● Self-Learner (source) |
| 2019-09-11 16:46:49 -0500 | received badge | ● Teacher (source) |
| 2019-09-11 02:19:10 -0500 | received badge | ● Notable Question (source) |
| 2019-09-10 16:43:54 -0500 | commented question | No tf recieved inside docker Next I tried to publish the tf data as a static transform publisher - node via a launchfile inside the docker. For examp |
| 2019-09-10 16:43:00 -0500 | commented question | No tf recieved inside docker I tested setting the ROS_IP to the host but that didnt change anything. |
| 2019-09-10 16:43:00 -0500 | received badge | ● Commentator |
| 2019-09-10 12:28:42 -0500 | received badge | ● Notable Question (source) |
| 2019-09-09 12:19:37 -0500 | commented question | No tf recieved inside docker Well, yes I did do that :D Now I tried to set ROS_IP of the environment to the host IP address with the command: expor |
| 2019-09-09 11:32:35 -0500 | commented question | No tf recieved inside docker I tried setting the ROS_IP to the IP adress to the adress I got, when I ran hostname -I outside of the docker. But then |
| 2019-09-09 11:07:48 -0500 | commented question | No tf recieved inside docker I tried setting the ROS_IP to the IP adress to the adress I got, when I ran hostname -I outside of the docker. But then |
| 2019-09-09 08:49:16 -0500 | received badge | ● Popular Question (source) |
| 2019-09-09 05:31:26 -0500 | commented question | No tf recieved inside docker Ok I understand, thank you! I checked and I am able to ping the machine running the docker environment by its hostname |
| 2019-09-09 05:09:10 -0500 | commented question | No tf recieved inside docker What exactly do by "ping the host by name"? Do you mean the roscore? |
| 2019-09-08 17:02:32 -0500 | answered a question | Autoware op_global_planner error Sorry for my late reply! I was missing vector map info, adding these solved the problem. Thanks |
| 2019-09-08 17:00:46 -0500 | commented question | Error launching autoware 1.12.0 in docker I have not solved that issue. I built autoware from source, that worked for me. |
| 2019-09-08 16:59:36 -0500 | edited question | No tf recieved inside docker No tf recieved inside docker Hello, I am trying to run Apollo 3.0 with the carla simulator with a ros bridge. Currentl |
| 2019-09-08 16:57:58 -0500 | asked a question | No tf recieved inside docker No tf recieved inside docker Hello, I am trying to run Apollo 3.0 with the carla simulator with a ros bridge. Currentl |
| 2019-08-30 02:45:04 -0500 | received badge | ● Popular Question (source) |
| 2019-08-27 21:24:32 -0500 | received badge | ● Notable Question (source) |
| 2019-08-22 03:29:45 -0500 | received badge | ● Famous Question (source) |
| 2019-08-19 14:09:23 -0500 | asked a question | Autoware op_global_planner error Autoware op_global_planner error Hello, I am trying to run autoware (1.12.0) in simulation with carla (0.9.5) using a r |
| 2019-08-19 14:03:05 -0500 | edited question | Autoware with carla: offset between point map and world Autoware with carla: offset between point map and world Hello, I am trying to run autoware 1.12.0 wit the carla simulat |
| 2019-08-19 14:02:17 -0500 | received badge | ● Editor (source) |
| 2019-08-19 14:02:17 -0500 | edited question | Autoware with carla: offset between point map and world Autoware with carla: offset between point map and world Hello, I am trying to run autoware 1.12.0 wit the carla simulat |
| 2019-08-19 13:58:16 -0500 | asked a question | Autoware with carla: offset between point map and world Autoware with carla: offset between point map and world Hello, I am trying to run autoware 1.12.0 wit the carla simulat |
| 2019-08-18 23:13:11 -0500 | received badge | ● Popular Question (source) |
| 2019-08-18 04:04:29 -0500 | commented answer | Creating an Autoware Vector Map from CARLA Point Cloud Map Thank you! Converting using pcl_tool worked! |
| 2019-08-18 04:03:46 -0500 | answered a question | Creating an Autoware Vector Map from CARLA Point Cloud Map Thank you! Converting with pcl_tools worked perfectly! |
| 2019-08-18 04:03:46 -0500 | received badge | ● Rapid Responder (source) |
| 2019-08-18 04:03:00 -0500 | marked best answer | Creating an Autoware Vector Map from CARLA Point Cloud Map Hello, I am running Autoware (1.12.0) with Carla (0.9.5) using a ROS bridge. The bridge works fine, but the agent does not avoid obstacles. LiDAR Euclidean clustering detects objects and passes them on to the costmap generator. The costmap generator however does not have any output. I suspect that the problem is the missing vector map. Therefore I tried to create a verctor map based on the point cloud map, using Autowares Vector Map Builder (https://tools.tier4.jp/feature/vector...). But when I try to upload the Carla PCD file nothing happens. Apparently the Vector Map Builder can not import binary compressed PCD files. This error appears in the console of the Vector Map Builder Is there a way to import binary compressed files, or a way to uncompress the file? Thanks for yours support! |
| 2019-08-17 09:37:17 -0500 | asked a question | Creating an Autoware Vector Map from CARLA Point Cloud Map Creating an Autoware Vector Map from CARLA Point Cloud Map Hello, I am running Autoware (1.12.0) with Carla (0.9.5) usi |
| 2019-08-05 04:48:25 -0500 | received badge | ● Famous Question (source) |
| 2019-07-23 19:11:04 -0500 | received badge | ● Notable Question (source) |
| 2019-07-23 10:11:15 -0500 | received badge | ● Notable Question (source) |
| 2019-07-21 06:24:34 -0500 | received badge | ● Popular Question (source) |
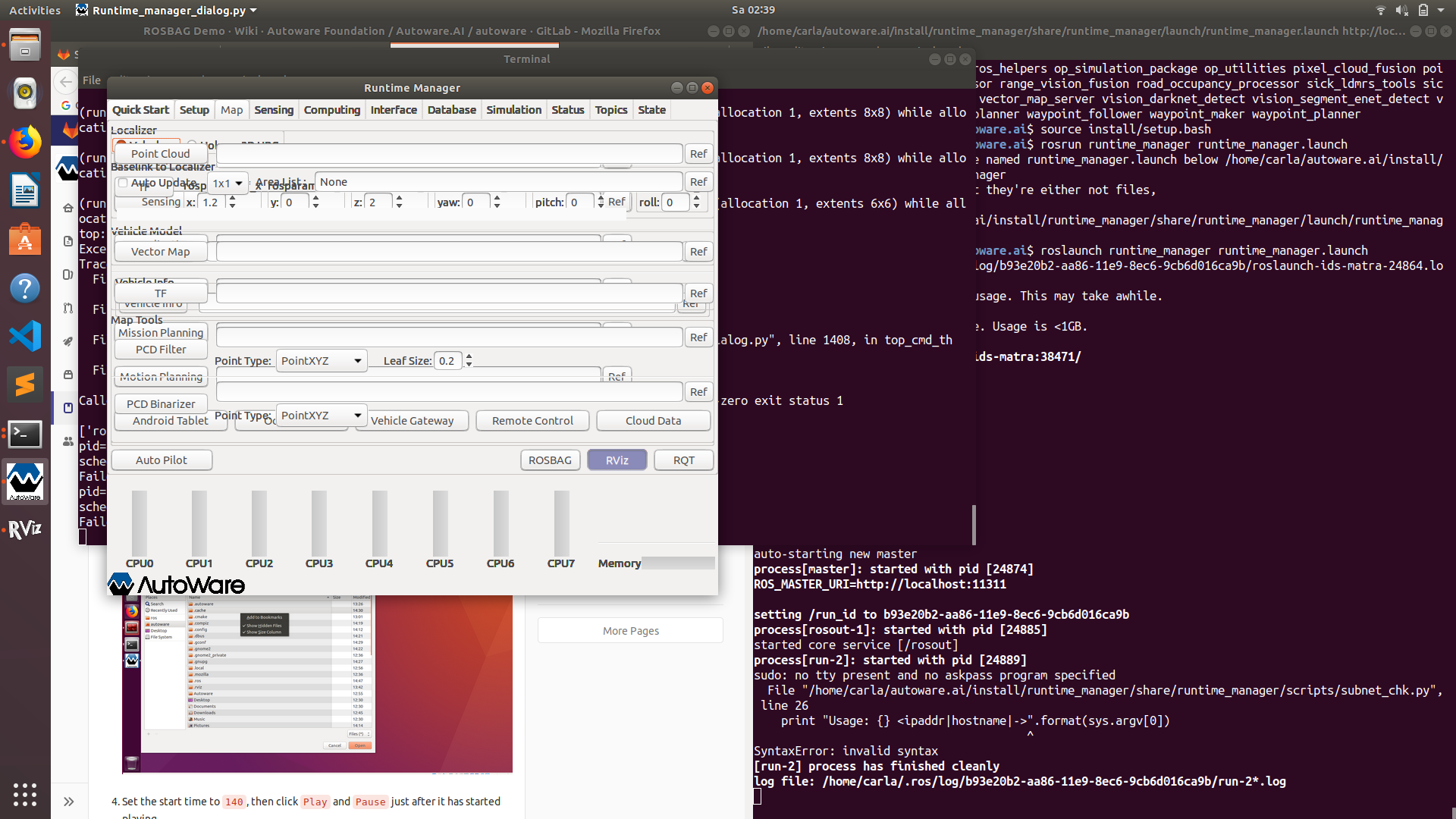
| 2019-07-20 10:08:36 -0500 | marked best answer | autoware runtime manager graphic bug I am trying to run the autoware runtime_manager for autoware 1.12.0 on ubuntu 18.04 with ROS melodic. I installed autoware from source following these steps: https://gitlab.com/autowarefoundation... (I build autoware without CUDA support) To start the runtime_manager I use the following commands: As expected two terminals pop up, one running the roscore and one runing the runtime_manager. So far everything works as expected. But when I press any button in the runtime_manager (for example to start rviz) the runtime_manager starts to look like this: There is no error visible in either of the running terminals. Can someone please help me figure out how to solve this issue? |
| 2019-07-20 10:08:36 -0500 | received badge | ● Scholar (source) |
| 2019-07-20 04:01:34 -0500 | received badge | ● Enthusiast |
| 2019-07-19 19:51:53 -0500 | asked a question | autoware runtime manager graphic bug autoware runtime manager graphic bug I am trying to run the autoware runtime_manager for autoware 1.12.0 on ubuntu 18.04 |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.